慈善捐赠管理
CTF
ajax
intersect
目标检测
并发编程
spring cloud
图像阴影消除
web大作业
iot
网络工程师
cocos2dx-lua
超级电容
RHCE
condition
内联函数
autoregressive
高精地图
fastapi
多版本并发控制机制
车载系统
2024/4/11 19:46:49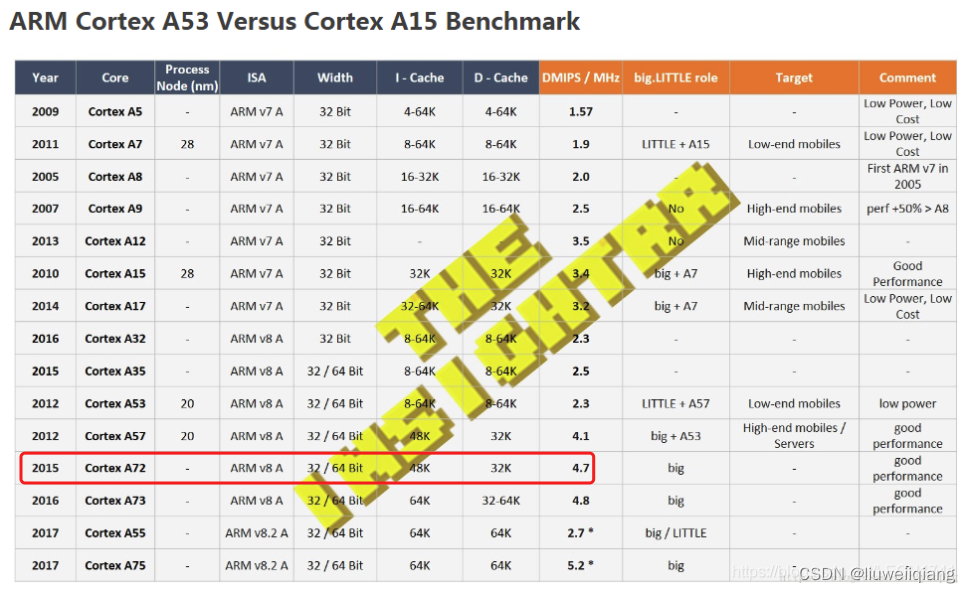
如何计算 SDK 占用的 CPU 算力值(DMIPS)
什么是 DMIPS ?
网上搜了些 DMIPS 的相关材料,知道它是用来评价 CPU 运算能力的一个指标。其中在知乎上有人介绍这个概念,是自动驾驶芯片性能常用的评价指标(自动驾驶芯片性能评价指标:DMIPS,TOPS - 知乎)。
如何计算…
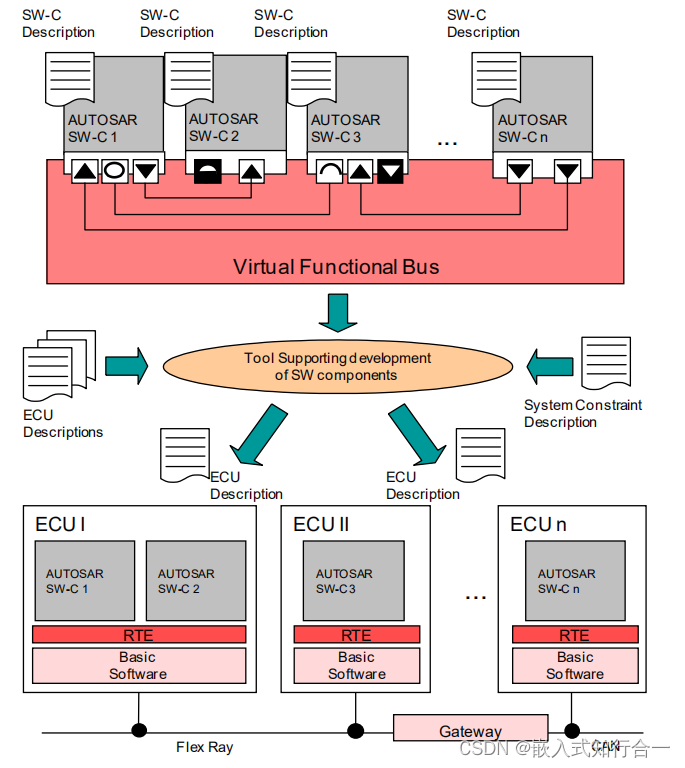
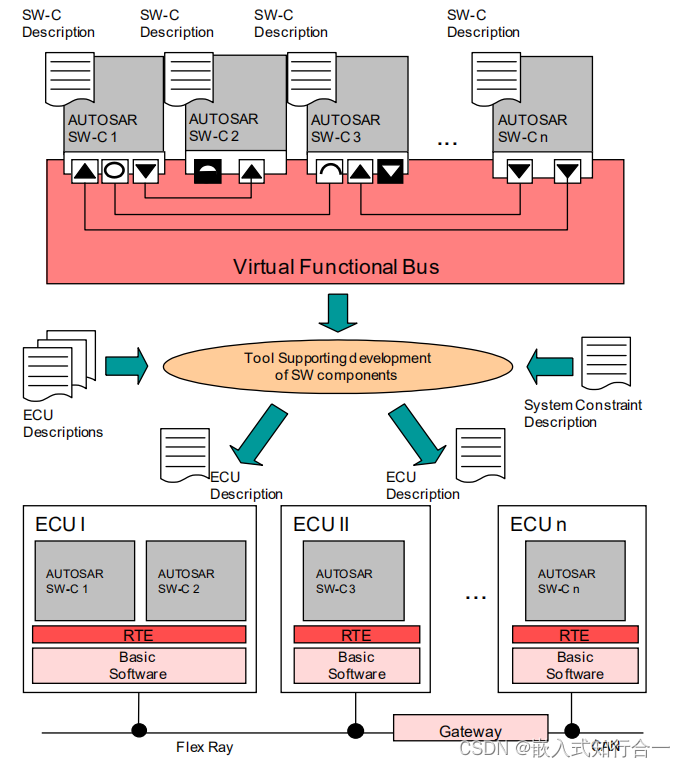
1-4 AUTOSAR方法论
总目录——AUTOSAR入门详解AUTOSAR入门详解目录汇总:待续中。。。https://xianfan.blog.csdn.net/article/details/132818463 目录
一、前言
二、方法论
三、单个ECU开发流程 一、前言 汽车生产供应链上有以下角色:OEM、TIER1、TIER2,其主…

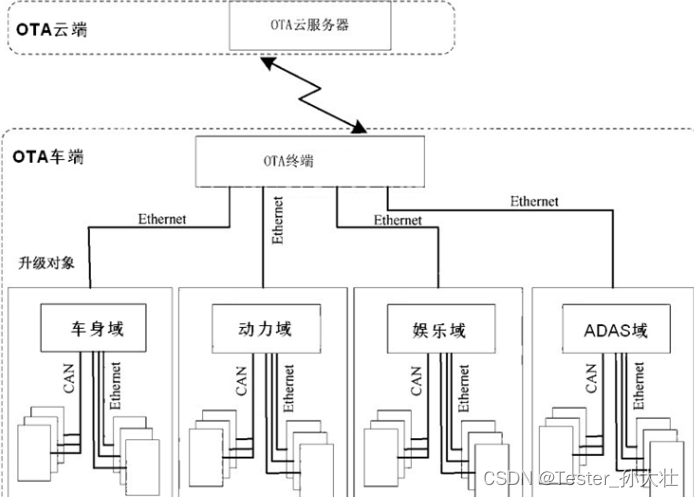
整车FOTA实现思路
本文简单介绍整车FOTA(Firmware Over-The-Air)的一般实现方案,可以实现对整车的固件升级和管理:
1. 设计OTA平台
建立一个OTA平台,用于管理和分发车辆固件更新。该平台应具备以下功能: - 用户管理&…
整车信息安全工作简介
在整车研发生命周期内,信息安全应被视为一个重要的方面,以下是一些实施信息安全的关键措施:
1. 安全风险评估:在整车研发的早期阶段,进行安全风险评估是至关重要的。通过对车辆系统和组件进行安全威胁分析,…
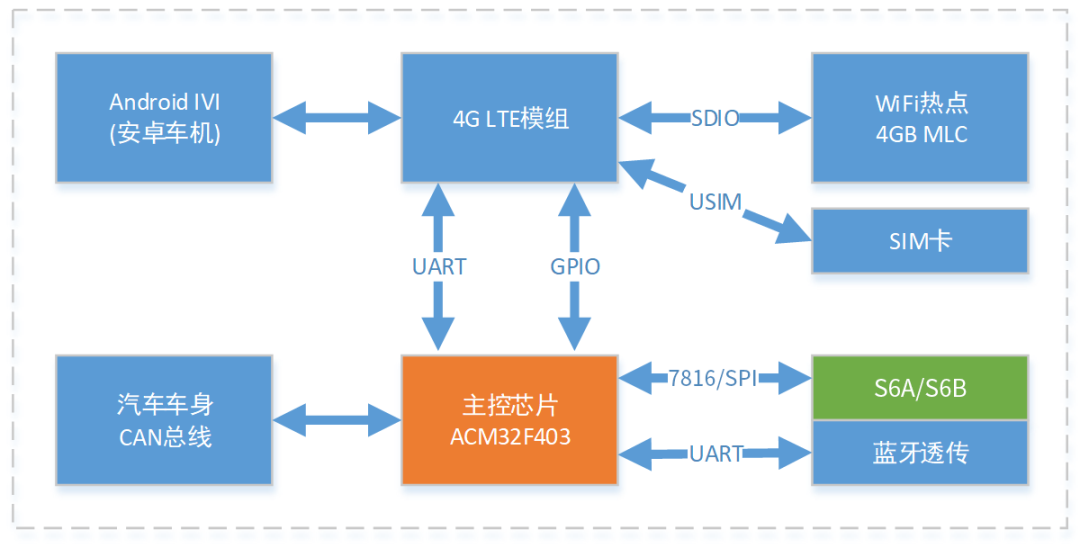
智能网联汽车终端T-BOX应用方案——主控芯片ACM32F403、安全芯片S6A/S6B
随着5G时代的到来,汽车智能化、网联化程度的不断提高,车载终端T-BOX作为车辆与云端的信息交互点,扮演着重要的角色。T-BOX的升级换代也为人们的出行实现了很多便利,同时也带来了极大的信息安全挑战,必须严格保证其数据…
9.9校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、自动驾驶一周资讯 -理想汽车计划进军自动驾驶卡车领域,宝马联合亚马逊开发下一代自动驾驶平台,丰田汽车重组自动驾驶和人工智能子公司
自动驾驶一周资讯 -理想汽车…
DoIP协议——汽车以太网应用介绍
DoIP目录 前言一、DoIP术语和缩写二、网络拓扑三、DoIP数据基本结构四、应用场景4.1 直接点对点连接4.2 多台外部测试设备分别和多台汽车在局域网内通过交换机点对点连接4.3 一台外部测试设备跨越本地网络与多台车辆连接4.4 外部测试设备的多个应用层实体(在一台硬件或多台硬件…
CAPL入门到精通之CAPL Functions(五) 数学函数
Vector CANoe CAPL系列相关文章导览,下面链接可直接跳转 CAPL入门到精通文章导览Vector CANoe VT System系列板卡文章导览,下面链接可直接跳转 Vector CANoe VT system传送门文章目录 Genreal Functions & Event ProceduresGeneral FunctionsTrigonometric and Mathemati…

<sa8650> sa8650介绍
一、sa8650 描述
设备说明 QAM8650P/QAMSRV1H是高通公司的下一代Snapdragon高级驾驶员辅助系统(ADAS)模块,旨在实现卓越的性能和电源效率。 它已被开发为SEooC(上下文之外的安全元素),针对假定的ASIL B用例*。QAM8650P/QAMSRV1H模块的关键组件包括SA8650P/SRV1H SoC、PM…
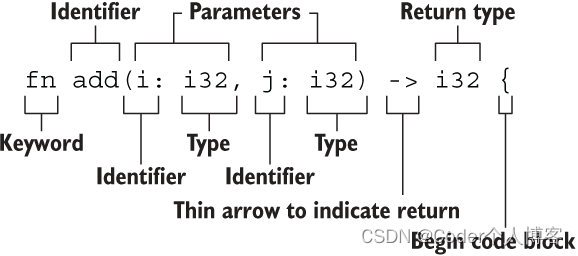
深入理解Rust函数
文章目录 一、概述二、函数要点三、函数参数四、函数返回五、Rust中的特殊返回类型5.1、无返回值5.2、永不返回的发散函数 团队博客: 汽车电子社区 一、概述 二、函数要点 1、函数名和变量名使用蛇形命名法(snake case),例如 fn add_two() -> {}。 2、函数的…
9.17 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、自动驾驶一周资讯 - 一汽与Mobileye 签署战略合作,小鹏汽车将用经销商销售逐渐替换直营模式,原小鹏汽车副总裁加盟赛力斯
自动驾驶一周资讯 - 一汽与Mobileye 签署战…


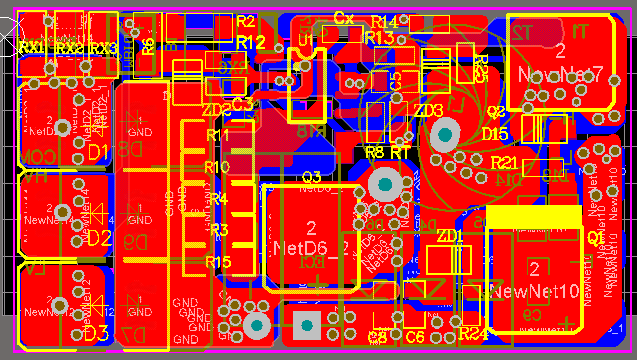
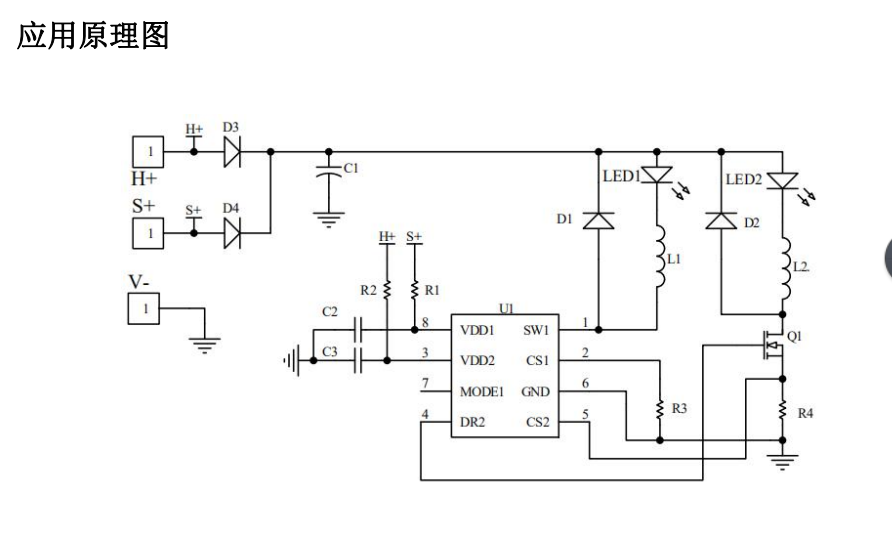
世微AP5160宽电压 LED 降压型恒流芯片14-18V 3A 电源PCB线路
这是一款14-18V 3A 电流的PCB设计方案.
运用的是世微AP5160 电源驱动IC,这是一款效率高,稳定可靠的 LED 灯恒流驱动控制芯片,内置高精度比较器,固定 关断时间控制电路,恒流驱动电路等,特别适合大功率 LED 恒流驱动。 …
【AUTOSAR】【CAN通信】CanSyn
AUTOSAR专栏——总目录_嵌入式知行合一的博客-CSDN博客文章浏览阅读239次。本文主要汇总该专栏文章,以方便各位读者阅读。https://xianfan.blog.csdn.net/article/details/132072415 目录
一、概述
二、约束说明

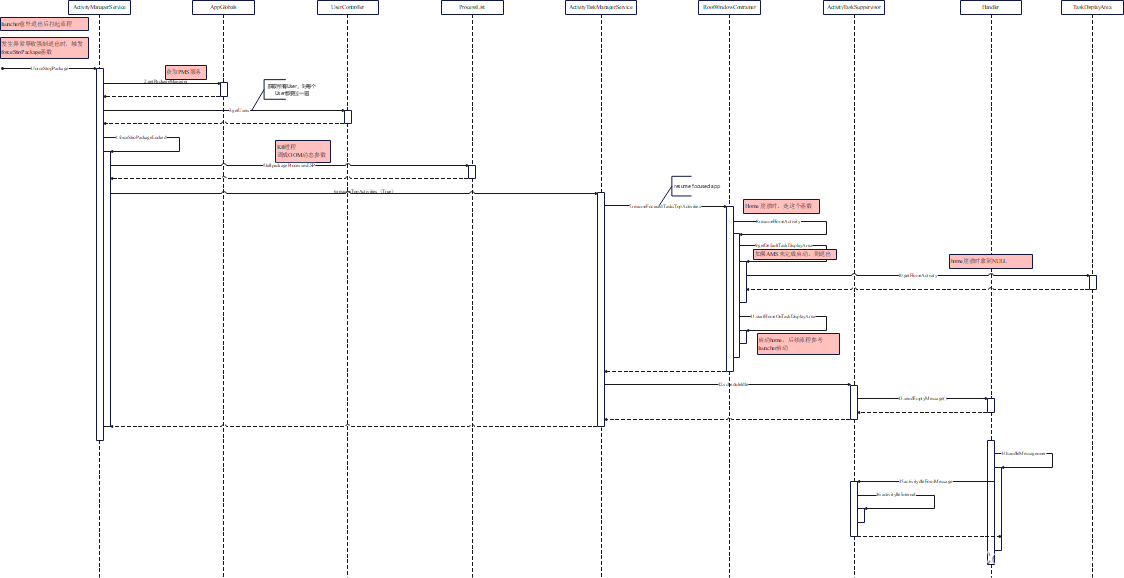
systemserver的inputdispatcher直接产生CANCEL事件原理分析-讨厌的android触摸面试题
背景回顾:
上一个blog已经重点讲解了app层面自己产生的Cancel触摸事件,大概产生的原理如下: 上一个blog地址:https://blog.csdn.net/learnframework/article/details/124086882 即可以看出来,在服务端systemserver其实…

Safran与是德科技合作推出基于GNSS技术的5G LBS方案
概述 虹科Safran与是德科技(Keysight)联手推进基于全球导航卫星系统(GNSS)技术的5G定位服务(LBS),利用虹科Safran先进的全球导航卫星系统(GNSS)仿真功能扩展是德科技的5G…

小米汽车进入生产调试冲刺阶段,雷军率队完成夏季新车路测
小米汽车通州生产基地即将进入生产调试冲刺阶段,小米集团董事长雷军率领小米汽车高层最近已经在新疆完成夏季新车路测,以争取在获得相关批文后尽快进入新车量产。 小米汽车的整个基地包括六个车间:压铸、冲压、车身、涂装、总装和电池。小米汽…
ARM Cortex-M核的内核态,用户态
首先,用户态和内核态是从操作系统层面上来划分的,如果没有操作系统,我可以直接运行在特权模式下,并使用特权指令。在这种情况下,我将负责管理和控制系统资源,执行关键操作,以及确保系统的安全性…
9.7 校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | Momenta 2024校招火热进行中!新增招聘岗位(内推)
校招 | Momenta 2024校招火热进行中!新增招聘岗位(内推) 2、…
总目录——AUTOSAR入门详解
AUTOSAR入门详解目录汇总:
一、AUTOSAR初识
1-1 AUTOSAR与AUTOSAR组织
1-2 AUTOSAR规范文档 待续中。。。
AURIX TC芯片中DSU实现安全启动
AURIX TC芯片中的DSU(Digital Signature Unit)是用于实现安全启动机制的关键模块。它负责对引导代码进行签名验证和核实,确保系统从可信源启动,防止恶意软件的植入和篡改。
DSU模块的主要功能包括:
1. 数字签名验证&…
Linux 5.15安全特性之ARM64 PAC
ARM64 PAC(Pointer Authentication Code)机制是ARM架构中引入的一种安全特性,旨在提供指针的完整性和安全性保护。它通过在指针中插入一段额外的代码进行签名,以验证指针的完整性,从而抵御缓冲区溢出和代码注入等攻击。…
Autosar基础——DLT(DiagnosticLogAndTrace)
DLT目录 前言一、DLT模块的作用二、DLT记录和追踪哪些信息2.1 来自DET模块的错误信息2.2 来自DEM模块的信息2.3 来自RTE的信息(VFB Trace)三、DLT与软件SWC的交互四、协议规范(Protocol specification)4.1 消息格式4.1.1 标准报头4.1.2 扩展报头4.2 Log等级五、Dlt时序图5.…
CAPL入门到精通之CAPL Functions(三) 下 - 读写文件实例解析hex文件
Vector CANoe CAPL系列相关文章导览,下面链接可直接跳转 CAPL入门到精通文章导览Vector CANoe VT System系列板卡文章导览,下面链接可直接跳转 Vector CANoe VT system传送门文章目录 读取`hex`文件什么是`hex`文件Hex文件格式概述`CAPL`实现解析公众号上一章节详细介绍了CAP…
【AUTOSAR】【通信栈】Nm
AUTOSAR专栏——总目录-CSDN博客文章浏览阅读339次。本文主要汇总该专栏文章,以方便各位读者阅读。https://blog.csdn.net/qq_42357877/article/details/132072415?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22132072415%22…

全球首家?梅赛德斯-奔驰将在成都启动超级充电站,功率高达480kW
根据官方宣布的消息,梅赛德斯-奔驰将在中国启动充电功率高达480kW的首批超级充电站建设项目。这些超级充电站将成为全球首家梅赛德斯-奔驰品牌的充电站,并计划于今年10月在成都投入使用。 除了成都,这些充电站还将陆续在包括北京、深圳等其他…
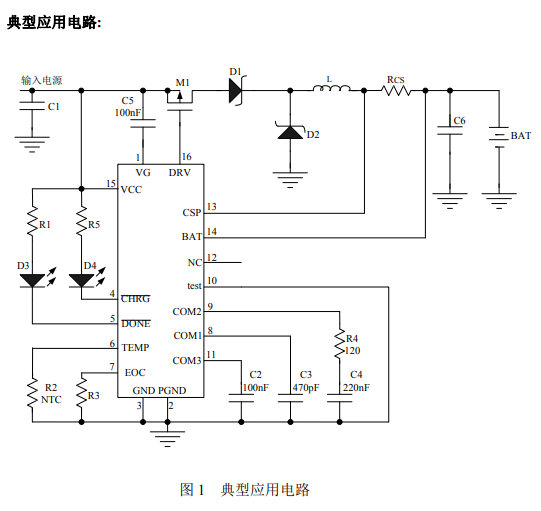
AP6934 PWM降压型 恒流恒压 三节锂电池充电管理芯片
AP6934是PWM降压型锂电池充电管理芯片,具有恒流恒压充电模式。恒流充电电流由连接于CSP管脚和BAT管脚之间的电流检测电阻RCS设置,在恒压充电模式,电池电压为12.6V,精度为1%。当VCC管脚电压大于低压锁存阈值,并且大于电…

供应商工厂突发爆炸,日本丰田7座工厂停工 | 百能云芯
根据日本共同社的最新报导,日本著名汽车制造商丰田汽车近期遭遇了一系列生产中断问题。这次生产中断的根本原因在于供应商公司发生了一起爆炸事件,导致零部件供应链受到了严重干扰,迫使丰田暂时停工。截至目前,这一事件已经影响了…
AP5191 降压恒流 双灯 12V5A 一切一LED车灯汽车大灯驱动方案
AP5191是一款PWM工作模式,高效率、外围简 单、内置功率MOS管,适用于4.5-150V输入的高 精度降压LED恒流驱动芯片。输出功率150W, 电流6A。
AP5191可实现线性调光和PWM调光,线性调 光脚有效电压范围0.55-2.6V. AP5191 工作频率可以通过RT 外部…

产品推荐 - 基于FPGA XC7K325T+DSP TMS320C6678的双目交汇视觉图像处理平台
一、产品概述 TES601是一款基于FPGA与DSP协同处理架构的双目交汇视觉图像处理系统平台,该平台采用1片TI的KeyStone系列多核浮点/定点DSP TMS320C6678作为核心处理单元,来完成视觉图像处理算法,采用1片Xilinx的Kintex-7系列FPGA XC7K325T作为视…
世微AP2813 内置1A外置3A两路输出降压恒流驱动IC LED储能指示灯应用
产品描述 AP2813 是一款双路降压恒流驱动器,高效率、简单、内置功率管,适用于 5-80V 输入的高精度降 压 LED 恒流驱动芯片。内置功率管输出功率可达 12W,电流 1.2A。 AP2813 一路直亮,另外一路通过 MODE1 切换 全亮,爆闪。AP2813…

2023做车载测试真的可以远离内耗!转行车载月入20K!
2023年,车载测试正处于一个发展阶段,随着新能源汽车的蓬勃发展,电气化、智能化逐渐成为发展趋势。在汽车开发过程中,测试是非常重要的一个环节。现在软件越来越多地被应用到汽车上,对软件测试的需求也越来越多、越来越…
风控反欺诈安全学习路标
1. 金融和支付领域知识 - 了解金融和支付领域的基本概念、业务流程和风险特点。 - 学习金融机构的监管要求和合规措施,如KYC(了解你的客户)和AML(反洗钱)。
2. 数据分析和挖掘技术 - 学习数据分析和数据挖掘的基本原理…

STM32 CAN使用记录:FDCAN基础通讯
文章目录 目的关键配置与代码轮询方式中断方式收发测试 示例链接总结 目的
CAN是非常常用的一种数据总线,被广泛用在各种车辆系统中。这篇文章将对STM32中FDCAN的使用做个示例。
CAN的一些基础介绍与使用可以参考下面文章: 《CAN基础概念》https://blo…

自学成为android framework高手需要准备哪些装备-千里马车载车机系统开发学习
背景
hi,粉丝朋友们: 大家好!经常有很多学员买课同学都会问到需要准备哪些装备,我也回答了很多学员了,今天就搞一篇文章来统一说明一下,告诉一下大家如果你想从一个framework新手变成一个framework开发的高…
Autosar-CanIf模块介绍
4.1CanIf模块简介 CanIf模块是为了要隔离MCal层与服务层,因此CanIf不可直接操作硬件资源。然而CanIf传输数据、接收数据要使用到Can模块的缓存,如果直接使用Can模块的缓存的话,那CanIf就与MCal层耦合在一起了。 为了解决这个问题,CanIf层使用了一个HOH的概念:Hardware Obj…
VN5620以太网测试——DoIP配置
文章目录 前言一、DoIP简介二、Vector Hardware Configuration三、Diagnostics/ISO TP Configuration四、Diagnostic Console五、添加Ethernet Packet Builder前言
CANoe(CAN open environment)VN5620 :是一个紧凑而强大的接口,用于以太网网络的分析、仿真、测试和验证。 V…
FreeRTOS基础概念
FreeRTOS目录 一、实时操作系统软实时硬实时二、FreeRTOS(免费的实时操作系统)官网三、FreeRTOS的优势3.1 抽象出时间信息3.2 可维护性和可扩展性3.3 团队开发3.4 简单的测试3.5 代码重用3.6 提高效率3.7 空闲时间3.8 电源管理3.9 灵活的中断处理3.10满足混合处理需求四、商业…
世微AP51656 耐压60V STO89-5 LED降压恒流驱动器
产品描述
AP51656是一款连续电感电流导通模式的降压恒流源,用于驱动一颗或多颗串联LED
输入电压范围从 5 V 到 60V,输出电流 可达 1.5A 。根据不同的输入电压和 外部器件, 可以驱动高达数十瓦的 LED。 内置功率开关,采用电流采样…
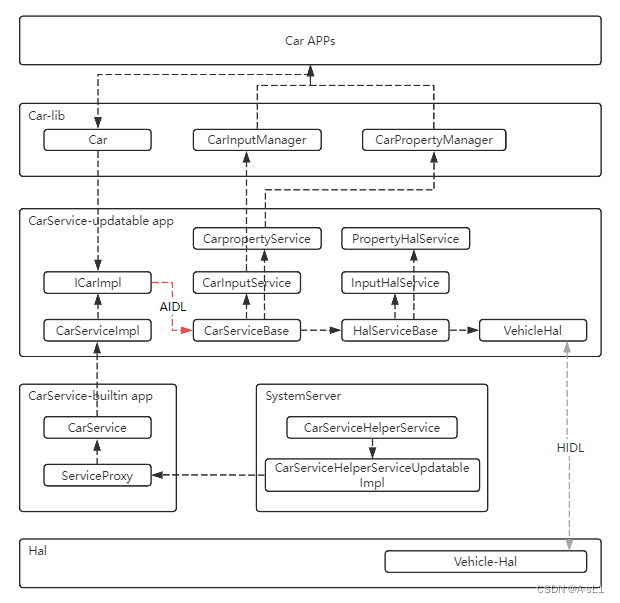
Android车载系统Car模块架构链路分析
一、模块主要成员
CarServiceHelperService
SystemServer 中专门为 AAOS 设立的系统服务,用来管理车机的核心服务 CarService。该系统服务的具体实现在 CarServiceHelperServiceUpdatableImpl
CarService
Car模块核心服务APP,Android 13版本开始分为…
宝马——使用人工智能制造和驾驶汽车
德国汽车制造商宝马(BMW)每年在全球制造和销售250万台汽车,其品牌包括宝马、MINI和劳斯莱斯。
宝马汽车以其卓越的性能和对新技术的应用而著名,它是道路上最精致的汽车之一,并且和其竞争对手戴姆勒(Daimler)一样,在将自动驾驶汽车…
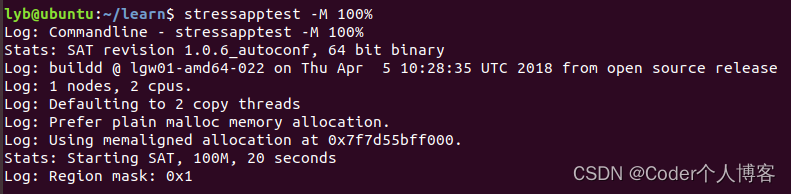
深入理解stressapptest
文章目录 一、概述二、安装2.1、源码编译安装2.2、命令行安装2.3、安装确认三、重要参数详解3.1、查询支持的参数3.2、参数说明 四、实例4.1、随机测试(默认模式)4.2、循环测试4.2、全内存测试 团队博客: 汽车电子社区 一、概述 stressapptest是一款免费…
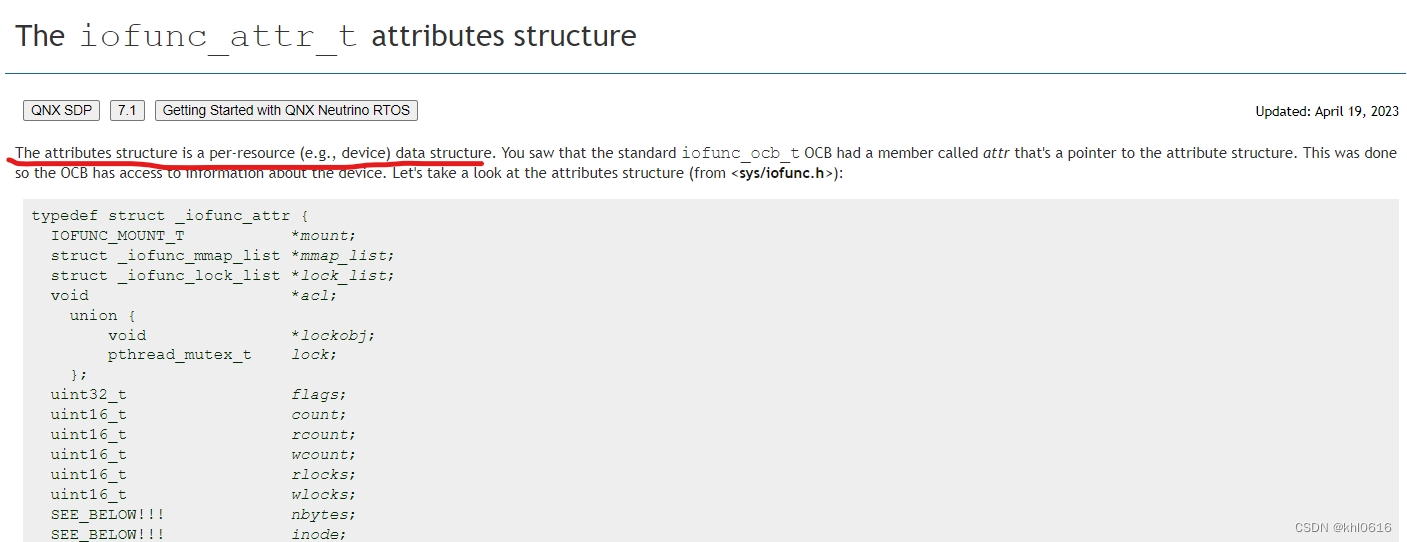
resource manager attributes structure(iofunc_attr_t) 扩展实例
文章目录 前言一、attributes structure(iofunc_attr_t)是什么二、iofunc_attr_t 扩展实例1. iofunc_attr_t 未扩展前的使用实例2. iofunc_attr_t 扩展后的使用实例总结参考资料前言
本文主要介绍如何扩展 QNX resource manager 的 attributes structure(iofunc_attr_t) 属性数…

OSEK OS任务调度的底层逻辑
先参考 FreeRTOS的任务触发底层逻辑 简述RTOS任务调度底层逻辑 AUTOSAR-OS的调度机制-调度表(没理解透,继续更新) OSEK与FreeRTOS在任务调度上最大的区别在于,FreeRTOS是基于全抢占任务调度和时间片轮转调度机制,具有…
十七、CANdelaStudio深入-创建新工程
本专栏将由浅入深的展开诊断实际开发与测试的数据库编辑,包含大量实际开发过程中的步骤、使用技巧与少量对Autosar标准的解读。希望能对大家有所帮助,与大家共同成长,早日成为一名车载诊断、通信全栈工程师。 本文介绍CANdelaStudio创建新工程的过程,欢迎各位朋友订阅、评论…

SurfaceFlinger的硬件Vsync深入分析-千里马android framework车机手机系统开发
背景:
学过或者你看过surfaceflinger相关文章同学都知道,vsync其实都是由surfaceflinger软件层面进行模拟的,但是软件模拟有可能会有误差或偏差,这个时候就需要有个硬件vsync帮忙校准。 故才会在surfaceflinger的systrace出现如下…
9.8 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 长安福特2024校园招聘正式启动
校招 | 长安福特2024校园招聘正式启动 2、2023校招总结--SLAM岗位 - 5
2023校招总结--SLAM岗位 - 5 3、校招&实习 | 格灵深瞳2024秋季校园招聘启…
自学成为android framework工程师需要准备哪些装备-千里马车载车机系统开发学习
背景
hi,粉丝朋友们: 大家好!经常有很多学员买课同学都会问到需要准备哪些装备,我也回答了很多学员了,今天就搞一篇文章来统一说明一下,告诉一下大家如果你想从一个framework新手变成一个framework开发的高…
AUTOSAR OS任务调度的底层逻辑
先参考 FreeRTOS的任务触发底层逻辑 简述RTOS任务调度底层逻辑 AUTOSAR-OS的调度机制-调度表(没理解透,继续更新) OSEK与FreeRTOS在任务调度上最大的区别在于,FreeRTOS是基于全抢占任务调度和时间片轮转调度机制,具有…

Autosar-Mcal配置详解-GPT
3.3.1添加GPT模块 方法与添加Dio相似,可参加Dio模块添加方法。 3.3.2 创建、配置GPT通道 1)根据需求创建GPT通道(即创建几个定时器) 本例中创建了3个定时器通道:1ms,100us,OsTimer。 2)配置GPT通道 配置T…
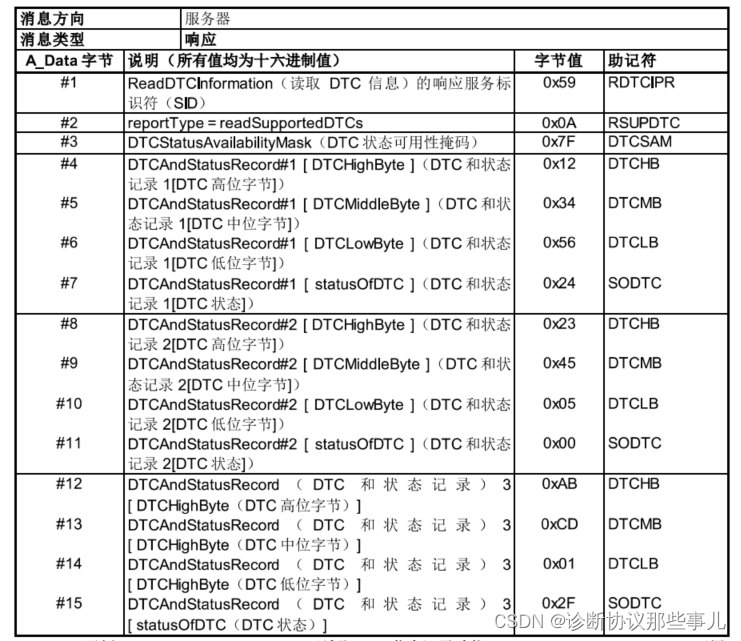
19 0A-检索服务器支持的所有DTC的状态
诊断协议那些事儿
诊断协议那些事儿专栏系列文章,19服务作为UDS中子功能最多的服务,一共有28种子功能,本文将介绍常用的19 0A服务:检索服务器支持的所有DTC的状态。此子功能不论DTC是否发生、状态如何,都让ECU返回所有…
CANdb++数据库操作
CANdb数据库操作 创建工程结构文件夹新建数据库&总线描述节点设置节点创建配置Message属性信号设置节点收发信号 环境变量配置一致性检验数据库工程XVehicle.dbc导入工程文件总结 创建工程结构文件夹
在文件夹X-Vehicle-1下,建立工程目录文件夹CANdb࿰…
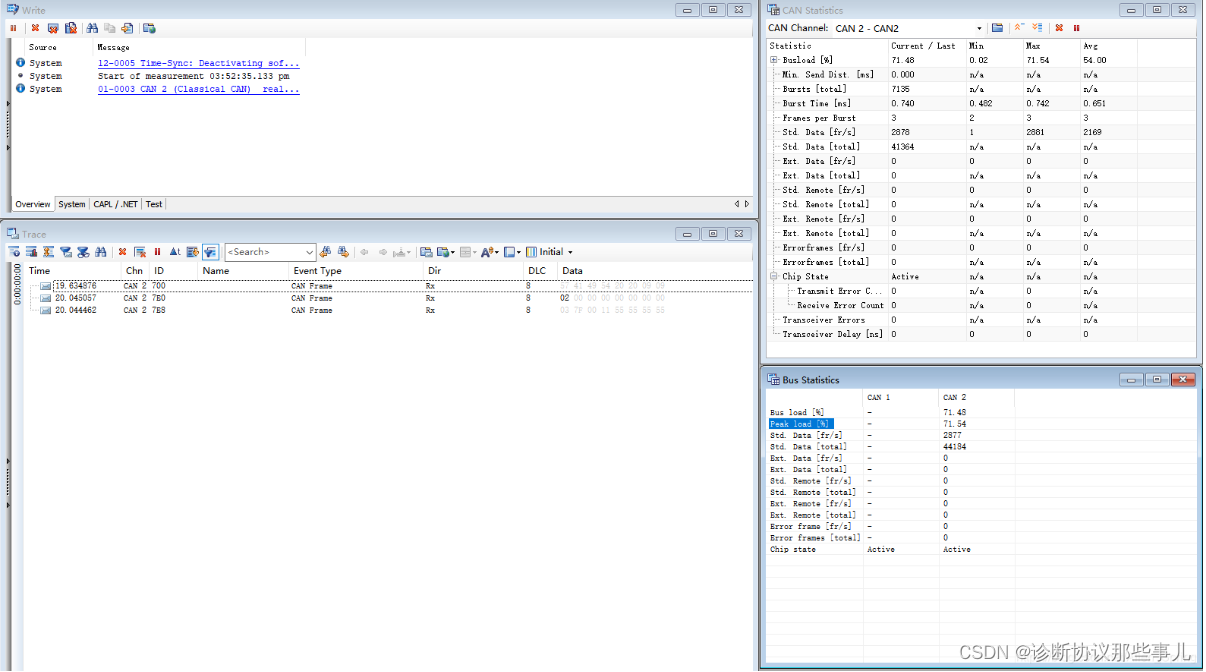
CAN总线负载及CANoe查看总线负载率
文章目录 一、什么是CAN总线的负载率?二、负载率计算三、CANoe查看总线负载率 一、什么是CAN总线的负载率?
一般业内对负载率的定义为:实际数据传输速率和理论上能达到的数据传输速率的比值。
传输速率一般是按秒来计算,数据传输…

适用于车载电动升窗器的解决方案
升窗器是指避免车主忘记关窗的自动关窗装置,主要通过电子模块加认组合,利用主机上的芯片里面设定的程序完成检测功能,使自动升窗步骤顺利完成。
■ 基于ACM32F403系列MCU ■ 高性价比软件控制方案,高算力 ■ MCU内置2路CAN总线&a…
Aspice介绍——SWE.1软件需求分析
SWE.1目录 一、Process purpose(过程目的)二、Process outcomes(过程成果)三、Base practices(基本实践)SWE.1.BP1:详述软件需求SWE.1.BP2:软件需求结构化SWE.1.BP3:分析…
优步让一切人工智能化
优步(Uber)的商业模式建立在对数据的颠覆性使用上--通过将双方智能手机的位置数据关联起来,将出租车司机与乘客配对。这意味着,它可以比传统出租车公司更快地安排司机去接乘客,极大地冲击了传统出租车公司的业务。
优步自成立以来࿰…

HarmonyOS NEXT应用开发之动态路由
介绍
本示例将介绍如何使用动态路由跳转到模块中的页面,以及如何使用动态import的方式加载模块
使用说明
通过动态import的方式,在需要进入页面时加载对应的模块。配置动态路由,通过WrapBuilder接口,动态创建页面并跳转。动态i…
Python简单模拟蓝牙车钥匙协议
本文设计一个简单的蓝牙车钥匙协议,协议包含DH密钥协商和基于RSA的身份认证功能,以及防重放与消息完整性验证。
1. 密钥协商过程: - 设定 DH 参数:素数 p 和生成元 g。 - 发送方(Alice)生成 DH 的私钥 a 并计算公钥 A…

虹科CiA演讲回顾 | CAN(FD)总线协议转换原理及其在汽车行业的应用
2023年9月14日,CiA中国技术日直播活动在线上举行,该活动致力于开展与CAN总线相关领域的技术工作,演讲者都是CAN领域的专家。虹科首席工程师陈皓受邀参与活动,并带来以“CAN和CAN FD总线协议转换”为主题的演讲。 本次演讲内容主要…

winscope怎么实现user版本上导出方案设计探讨-千里马android framework车载车机手机系统开发
背景
在马哥给讲解怎么用winscope来分析各种闪黑,黑屏等问题后,很多买课的同学都开始使用这个工具用于实际公司的项目了,但是很多同学又开始发现有一个问题,那就发现在user版本的手机设备上发现无法抓取相关的winscope࿰…
<sa8650>qcxserver 之 QCarCam 6.X API介绍 (第三部分)
@[TOC](<sa8650>qcxserver 之 QCarCam 6.X API介绍(第三部分))
3 QCarCam API功能文档
QCarCam API在QCarCam.h文件中定义。
3.1 初始化QCarCam库
3.1.1 QCarCamInitialize()
初始化QCarCam接口。这必须是初始化QCarCam库的第一个调用。
原型 QCarCamRet_e QCarCamInit…
2024.02.15 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | 中芯国际校园招聘
校招 | 中芯国际校园招聘 2、校招 | 恒生电子2024年春季校园招聘正式启动!
校招 | 恒生电子2024年春季校园招聘正式启动! 3、校招 | …
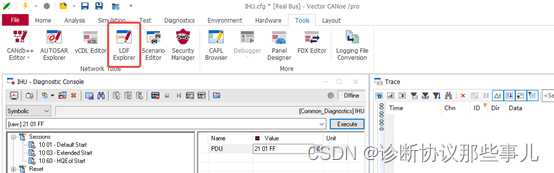
CANoe软件Tools中无法找到LDF Explorer
关联文章:
LDF概述和LDF Explorer工具介绍 问题描述
使用CANoe软件的菜单栏Tools中无法找到LDF Explorer 原因分析/解决方案:
①查看CANoe硬件是否带LIN license,并且license在正常激活时间内。 ②查看CANoe是否配置了LIN通道,…
ARM64安全特性之MTE
ARM64架构引入了MTE(Memory Tagging Extension)作为安全特性,用于增强内存访问的安全性。MTE使用内存标签来追踪和保护内存操作,以帮助检测和防御缓冲区溢出、使用-after-free等内存相关的安全漏洞。
MTE的核心思想是给每个内存地…
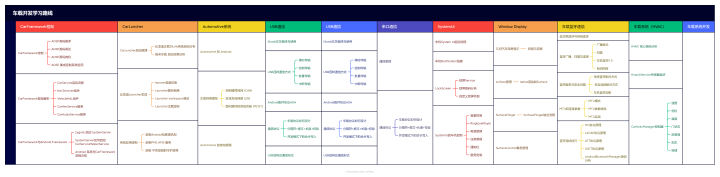
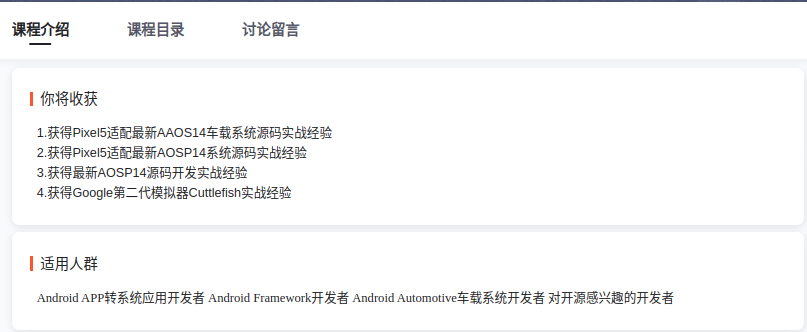
车载系统 AutoMotive学习,开启你的车企高薪岗位
前言
提到Android车载,各位开发者们应该都不陌生。传统的车载功能单一,无太多娱乐性,而随着智能化时代的发展,车载系统也被赋予了在系统中预装 Android 应用的能力,基于Android平台的车载信息娱乐系统——Android Aut…
Canoe UDS诊断技术
Canoe UDS诊断 汽车诊断技术概述诊断术语OBD诊断CAN诊断协议诊断周期UDS诊断服务Diagnostic Request和Response诊断服务介绍 诊断文件CDD介绍诊断安全访问服务(security Access)介绍 如何在Canoe UDS诊断实战CANoe 开启诊断功能Canoe 诊断实战 汽车诊断技术概述
汽车诊断技术是…

FlexRay汽车总线静电防护,如何设计保护方案图?
FlexRay是一种高速、实时、可靠、具备故障容错能力的总线技术,是继CAN和LIN总线之后的最新研发成果。FlexRay为线控应用(即线控驱动、线控转向、线控制动等)提供了容错和时间确定性性能要求。虽然FlexRay将解决当前高端和未来主流车载网络的挑…
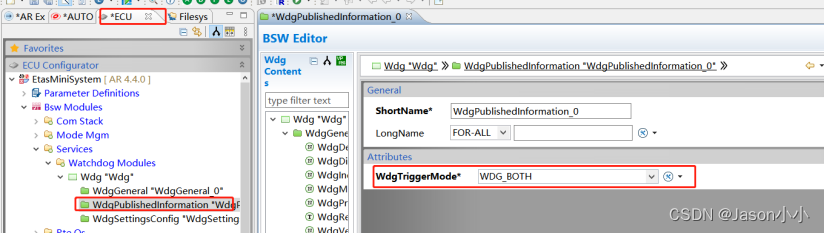
Autosar-WdgM配置详解-1
1创建、配置WdgM模块 1.1创建、配置Wdg模块 按下图的操作步骤创建Wdg模块: 创建完成后,按下图对Wdg模块进行通用配置: WdgMaxTimeout: Wdg最大的超时时间 WdgReset: 当看门狗超时时,需要执行哪种复位方式。
按下图配置WdgPublishInfo,在这里看门狗的触发方式选择为…
小米汽车上市进入倒计时,已开启内部试驾
在十四届全国人大二次会议上,全国人大代表、小米集团创始人、董事长CEO雷军回应了小米汽车的最新消息,小米汽车预计很快就要正式上市。
小米汽车推出了两款车型:SU7和SU7 Max。这两款车型均为纯电轿车,带来了不同的配置和性能特点…
基于LIN通信的诊断概述
文章目录 前言一、帧的类型1.1 诊断帧(Diagnostic Frame)二、LIN的传输层2.1 PDU的结构2.1.1 PDU结构-NAD2.1.2 PDU结构-PCI2.1.3 PDU结构-SID&RSID2.1.4 PDU结构-消息字节段(D1 to D6)三、诊断功能3.1 诊断规范3.1.1 使用传输层前言
LIN 是 Local Interconnect Network 的…
ECU面临的风险介绍(含案例)
ECU(电子控制单元)在信息安全方面主要面临以下问题:
1. 攻击风险
ECU被黑客攻击的风险是最主要的信息安全问题之一。黑客可以通过攻击ECU的硬件漏洞,例如通过物理访问或远程连接,操控ECU的功能,导致车辆失…
【AUTOSAR】【以太网】EthSyn
AUTOSAR专栏——总目录_嵌入式知行合一的博客-CSDN博客文章浏览阅读215次。本文主要汇总该专栏文章,以方便各位读者阅读。https://xianfan.blog.csdn.net/article/details/132072415 目录
一、概述
二、功能描述
2.1 初始化

UDS诊断网络层ISO15765-2(CAN)
诊断协议那些事儿
本文为诊断协议那些事儿专栏文章,从一个 ECU 到另一个 ECU,或外部诊断设备和一个 ECU 之间的通信,不仅依赖前文介绍的诊断寻址方式,更需要关注数据的传输,依赖网络层、传输层协议去完成,…
PKCS#11及其在车联网中的应用
PKCS#11,全称为Public Key Cryptography Standard #11,是一种密码学标准,定义了一个通用的API(应用程序接口)来访问安全设备,如硬件安全模块(HSM)和智能卡。
PKCS#11标准由RSA Labo…
ARM虚拟化与车联网安全应用
ARM虚拟化简介
ARM虚拟化是指在ARM架构下实现虚拟化技术的方法和技术。虚拟化技术允许在一台物理机上运行多个虚拟机实例,每个虚拟机实例都能够独立运行操作系统和应用程序。
ARM虚拟化的主要目标是提供高效、可扩展和安全的虚拟化环境。以下是一些关键概念和技术…
智能网联汽车自动驾驶数据记录系统DSSAD数据配置
目录 第一章 数据配置一般要求 第二章 数据配置文件中的文件描述 第三章 数据配置文件中的数据描述 第四章 数据配置文件中的数据字典 表A.1 数据字典格式定义 第一章 数据配置一般要求 数据配置文件数据内容应为可读的十进制数据。 数据配置文件应以文件的形式存储在自动驾驶…
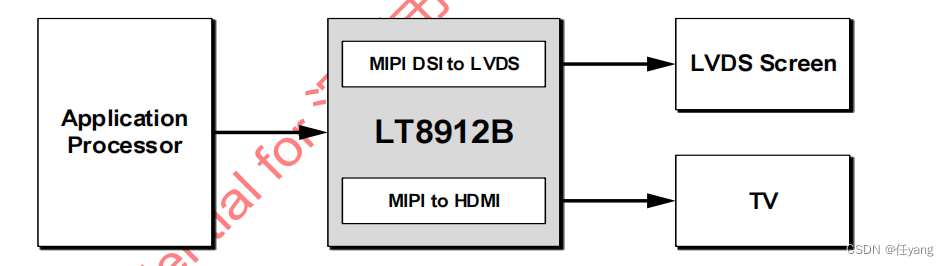
龙迅LT8912B 单通道MIPIDSI桥接LVDS+HDMI(1.4)同显点屏LVDS,加环出一路HDMI
龙迅LT8912B
描述:
Lontium LT8912B MIPIDSI到LVDS和HDMI桥采用单通道MIPID-PHY接收器前端配置,每个通道有4个数据通道,每个数据通道运行1.5Gbps,最大输入带宽可达6Gbps。对于屏幕应用,该桥解码MIPIDSI 18bpp RGB666和24bpp RGB…
9.4 校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 航天科工二院2024校招
校招 | 航天科工二院2024校招 2、校招 | 中国航空无线电电子研究所2024届校招
校招 | 中国航空无线电电子研究所2024届校招 3、校招 | 南京841研究所2024届校…

CAPL——发送自定义报文
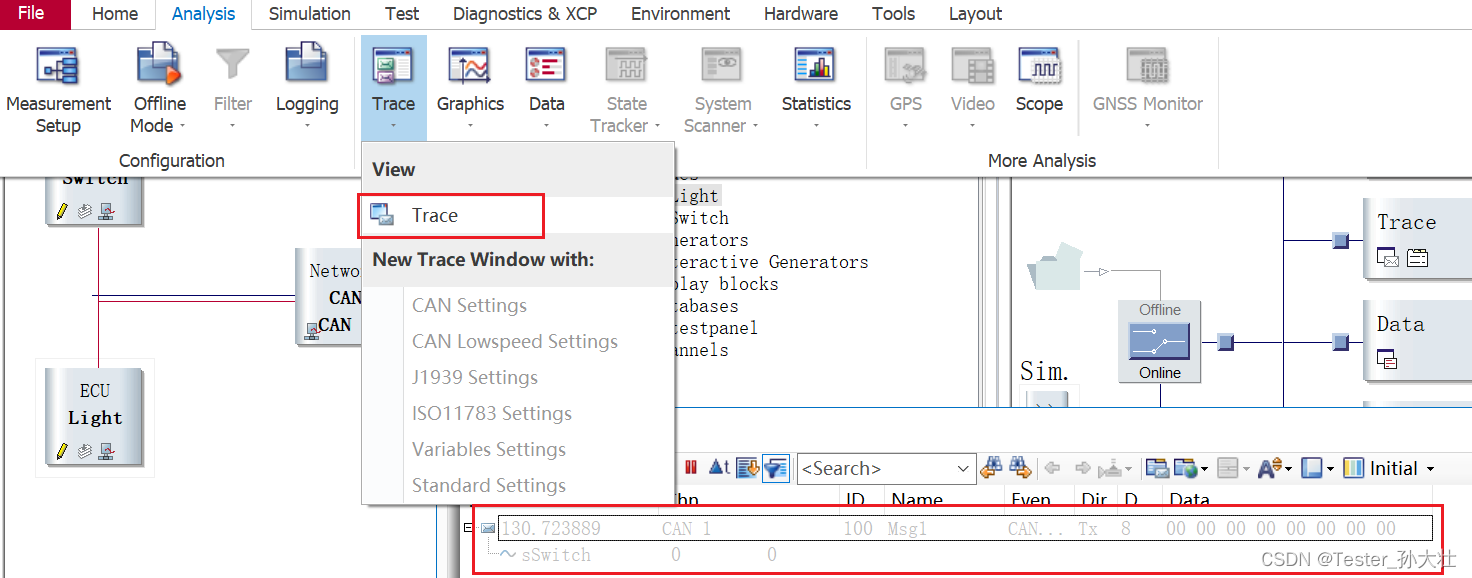
文章目录 一、前言二、CANoe操作二、CAPL程序三、Trace结果一、前言
CAPL是CANoe自带的一个编程语言,基本语法基于C语言,通过CAPL可以发挥CANoe更高效、更强大的功能。CAPL最大的特点就是可以编程灵活的完成报文的发送,报文包括通信报文及诊断报文
本文讲述模拟一个报文周…
周立功ZCANPRO简介和使用
ZCANPRO目录 周立功ZCANPRO简介一、软件安装ZCANPRO官网链接:驱动官网链接 二、ZCANPRO使用1.设备管理2.选择CAN、CANFD波特率计算器使用方法(可选) 3.新建视图CAN视图DBC视图 4.发送数据普通发送DBC发送 三、高级功能UDS诊断 周立功ZCANPRO简…
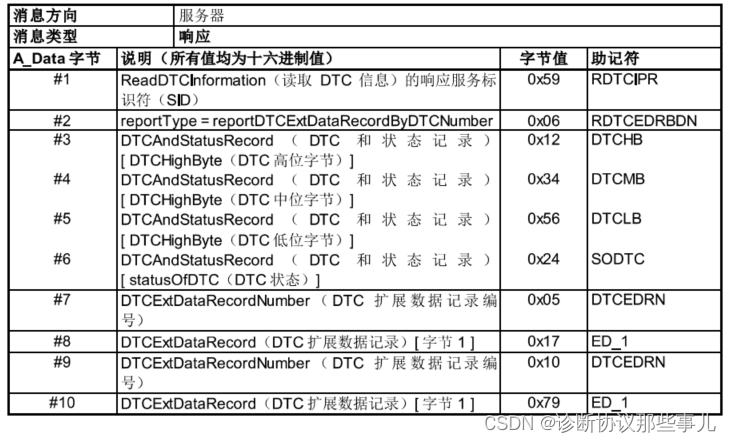
19 06-读取DTC扩展数据记录
诊断协议那些事儿
诊断协议那些事儿专栏系列文章,19服务作为UDS中子功能最多的服务,一共有28种子功能,本文将介绍常用的19 06服务:读取DTC扩展数据。
关联文章: 19服务List 19 01-通过状态掩码读取DTC数目 19 02-检…
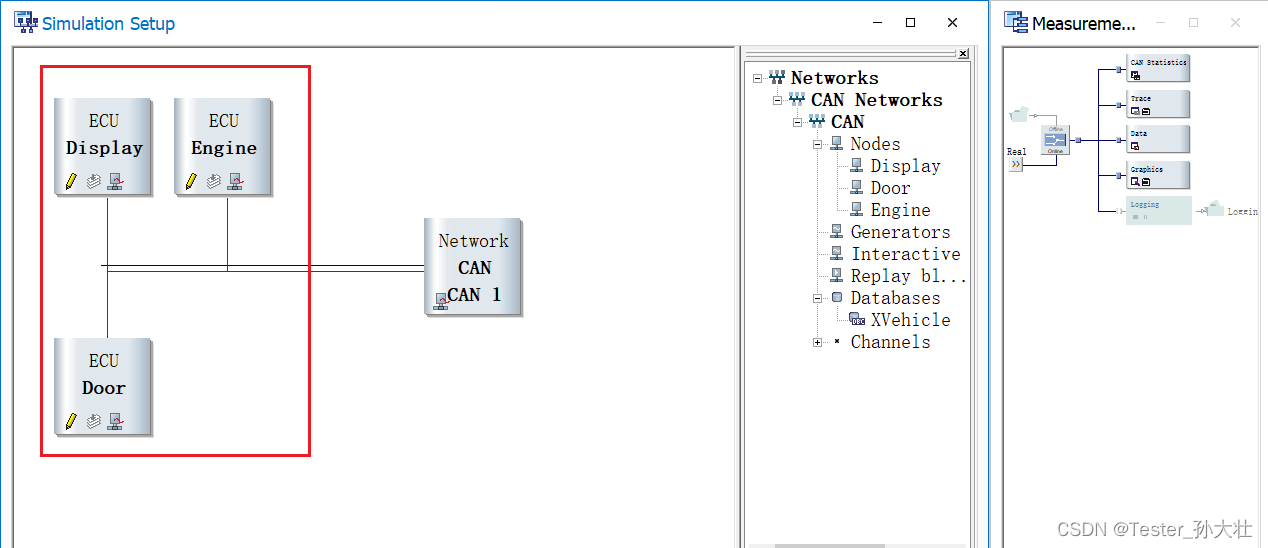
CANoe创建仿真工程
CANoe创建仿真工程 写在前面仿真工程的创建创建工程添加CAN数据库添加系统变量创建面板创建网络节点为节点添加代码工程运行测试总结 写在前面
Canoe的安装不是特别方便,我是参加了松勤的培训课程,不仅需要安装软件还需要安装驱动,刚刚学习的…
写给2023年andriod程序员的一封信
hi,粉丝朋友们: 大家好!近来很多粉丝朋友都在说android工作特别难找,一个岗位都是几千份简历…大家心里都是特别的焦虑。今天就来给大家写一封信,给大家分享一些经验和办法,帮助粉丝朋友们更好的度过这个寒…
NXP是?车载系统上NXP提供什么芯片?有什么功能?
NXP是?
NXP Semiconductors(恩智浦半导体)是一家全球知名的半导体公司,专注于为汽车、工业、计算、消费电子、通信基础设施和移动设备等领域提供创新的解决方案。NXP的产品线包括微控制器、处理器、传感器、射频解决方案、电源管…
【AAOS车载系统+AOSP14系统攻城狮入门实战课】:正式上线了(二百零三)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 优质专栏:多媒…
Autosar基础安全架构简介
AUTOSAR基础安全架构(BSW Security)是AUTOSAR标准中的一个模块,旨在提供用于保护汽车电子系统的基本安全功能和服务。基础安全架构包括访问控制、身份认证、加密、数字签名、密钥管理等关键安全功能。
下面详细介绍AUTOSAR基础安全架构的主要…
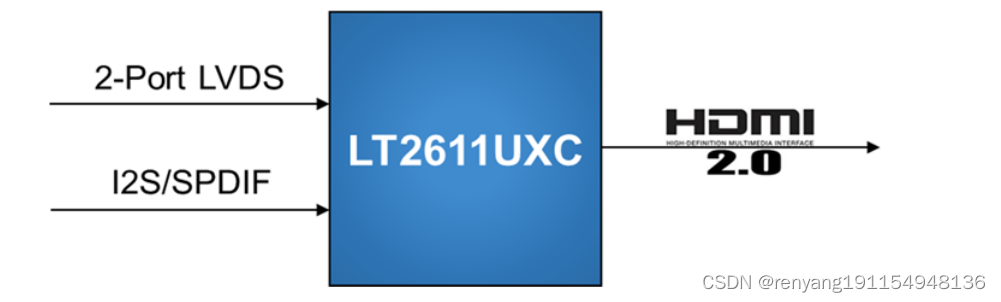
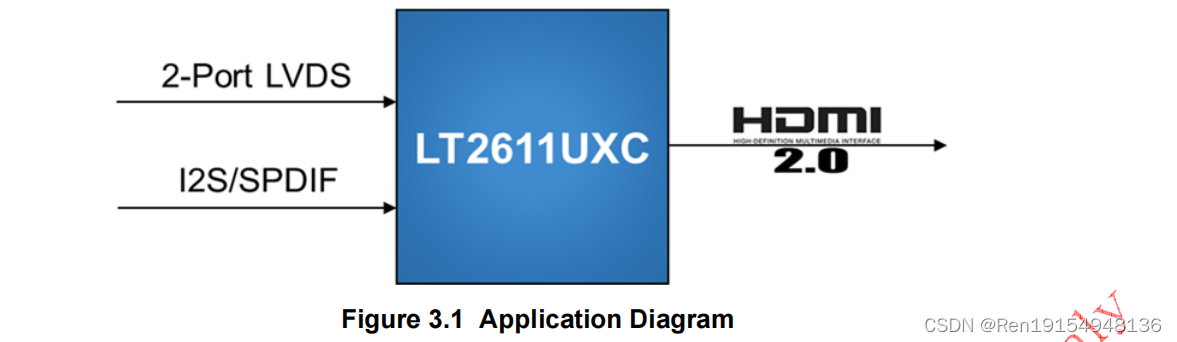
龙迅LT2611UXC 双PORT LVDS转HDMI(2.0)+音频
描述:
LT2611UXC是一个高性能的LVDS到HDMI2.0的转换器,用于STB,DVD应用程序。
LVDS输入可配置为单端口或双端口,有1个高速时钟通道,3~4个高速数据通道,最大运行1.2Gbps/通道,可支持高达9.6Gbp…
QNX应用开发实用命令
文档
QNX官方函数接口说明:
https://www.qnx.com/developers/docs/7.1/#com.qnx.doc.neutrino.lib_ref/topic/about.htmlQNX编译相关官方文档:
https://www.qnx.com/developers/docs/7.1/#com.qnx.doc.neutrino.prog/topic/devel.html命令
pidin -p …
LIN报文帧——类型与格式
文章目录一、LIN的报文帧类型1.1 无条件帧(Unconditional Frame):1.2 事件触发帧(Event Triggered Frame):1.3 偶发帧(Sporadic Frame):1.4 诊断帧:二、报文帧格式2.0 LIN总线波形2.1 同步间隔段2.2 同步段2.3 受保护ID段2.4 数据…
AndroidR集成三方Native服务组件
一、背景
该项目为海外欧盟市场版本,需集成三方IDS安全组件,进程运行时注入iptables指令至链表,检测网络运行状态,并收集异常日志并压缩打包成gz文件,提供给Android上层应用上报云端。
二、分析
1、将提供的组件包集成至系统vendor分区
/vendor/bin/idsLogd/vendor/li…
Android P车机添加屏幕多指全局自定义手势操作
一、需求
1、设置应用新增多指手势开关功能,支持双指、三指、四指进行上滑、下滑、左滑、右滑等手势操作,相应手势执行某种功能。
2、手势操作为所有界面均可响应,全局行为。
3、不同项目可固化不同手势行为,也可自定义手势功能。
二、分析
1、原生系统已支持从屏幕边…
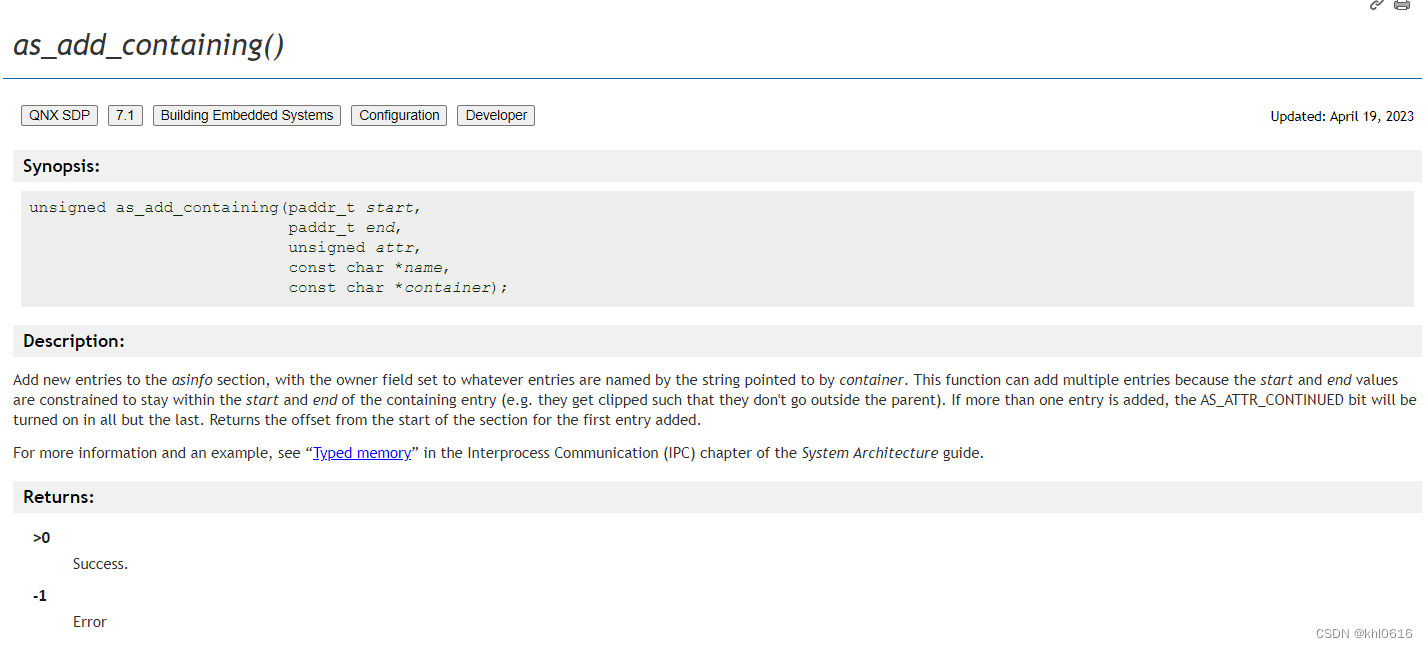
QNX Typed memory介绍
文章目录 前言一、什么是 Typed memory二、查看系统已有Typed memory 的方法三、Typed memory 的使用方法1.定义一个packet memory并从系统内存中分出它1.1 as_add()1.2 as_add_containing()2. 从 Typed memory 中申请内存2.1 POSIX method 申请内存2.2 QNX Neutrino method 申…
ARM Cortex-A、Cortex-M和Cortex-R简介
ARM Cortex-A,Cortex-M和Cortex-R是ARM处理器系列的不同产品线,针对不同的应用场景和要求进行了优化。以下是它们之间的主要区别:
1. 应用场景:Cortex-A系列处理器主要用于高性能计算设备,例如智能手机、平板电脑、个…
ARM TZC-400原理及配置方式
吧ARM TZC-400是一种TrustZone Controller,用于ARM Cortex-A系列处理器中的硬件支持。TrustZone是ARM提供的一种安全技术,通过在处理器上创建两个不同的安全区域(Secure Zone和Non-Secure Zone)来提供硬件级别的安全隔离。
TZC-4…
9.29 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 中兴机器人 霞智科技2024届校园招聘正式启动(内推)
校招 | 中兴机器人 霞智科技2024届校园招聘正式启动(内推) 2、2023校招总结--自动…
Bootloader——预编程流程
预编程目录 前言一、预编程步骤1.1 切换到扩展会话1.2 检查刷写前提条件整车ECU进入扩展会话(补充)1.3 停用故障码存储功能1.4 停止通信(一般报文或网络管理报文)前言
刷写过程定义了刷写前、刷写中、刷写后三个阶段。 一、预编程步骤
预编程步骤用来做刷写前的CAN网络准…
BootLoader-UDS刷写流程
文章目录 前言一、ECU启动要求二、诊断会话管理三、Bootloader刷写流程前言
Bootloader是所有支持重编程的ECU必须具备的软件功能,在ECU运行过程中,执行的是应用软件和应用数据,仅当应用软件或应用数据无效或者上电之初,或者要求对其进行升级或特殊测试的时侯,才会运行Bo…
1-5 AUTOSAR数据交换文件ARXML
目录
一、Arxml文件
二、各类ARXML文件 一、Arxml文件 arxml文件是AUTOSAR(Automotive Open System Architecture)标准定义的XML文件,用于描述汽车电子系统中的软件组件、通信接口和参数配置等信息。 arxml文件的主要作用是在AUTOSAR架构下…

Adaptive AUTOSAR——Update and Configuration Management(VRTE 3.0 R21-11)
16.1 What is Update and Configuration Management?
更新和配置管理(UCM)是自适应平台服务中的一个功能集群。
作为一种自适应平台服务,UCM实现了自适应平台的主要目标之一:
支持在机器上运行的自适应应用程序的灵活更新、安…
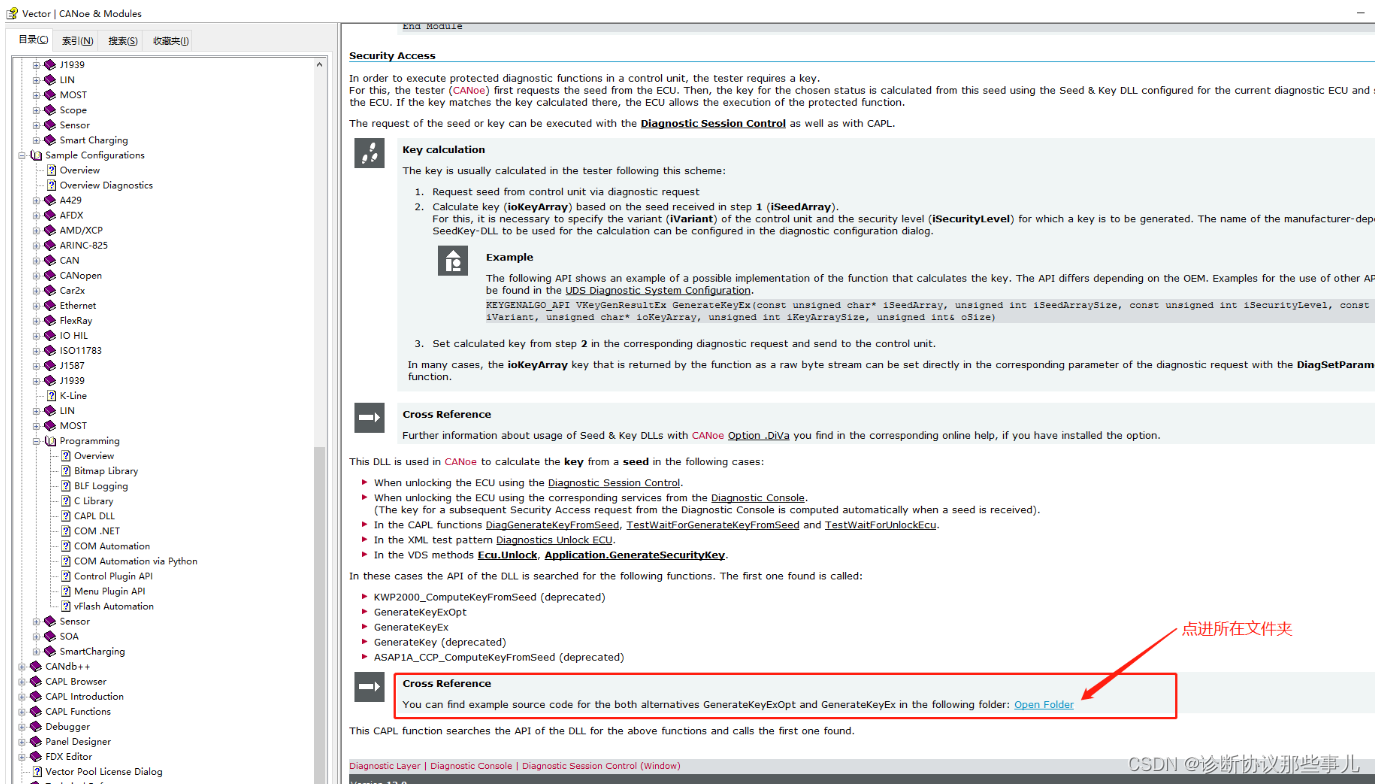
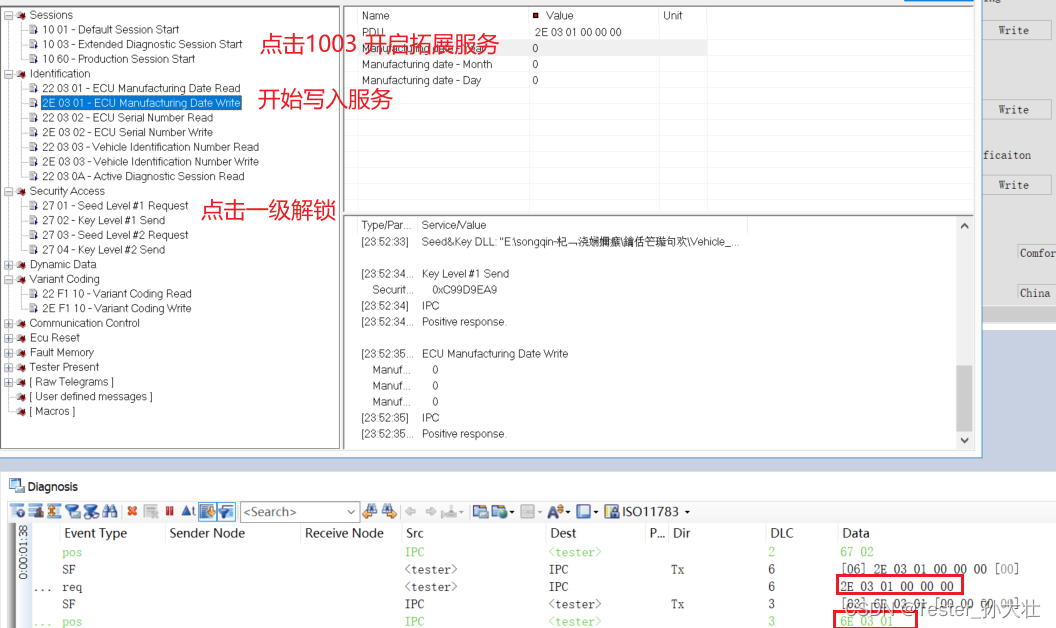
诊断DLL——Vector模板生成Send2Key.dll
文章目录 前言一、Vector诊断控制台Secutity Access基本原理二、Seed2Key DLL生成GenerateKeyEx源码自定义安全算法源码CAPL调用27服务解密算法前言
在实际诊断工程应用中,如UDS刷写——27服务,经常会遇到一些Seed2Key的算法问题,为了安全保密,这个算法的源码不便公开,我…
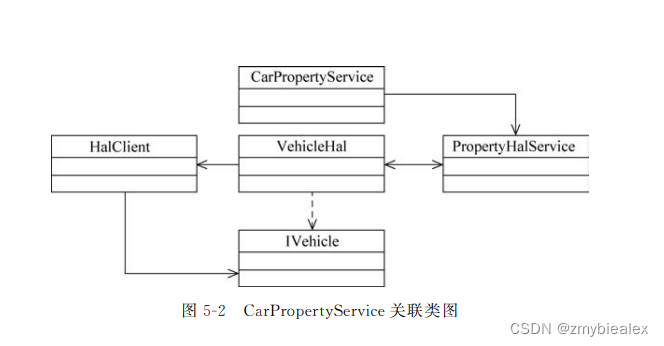
车载 Android之 核心服务 - CarPropertyService 解析
重要类的源码文件名及位置:
CarPropertyManager.java
packages/services/Car/car-lib/src/android/car/hardware/property/
CarPropertyService.java
packages/services/Car/service/src/com/android/car/ 类的介绍:
CarPropertyManager:…
车联网安全相关标准汇总
以下是与车联网安全相关的国家标准的一些例子:
一. ISO/SAE 21434:2020 - 道路车辆网络及通信系统安全性 - 工程标准和管理指南
ISO/SAE 21434:2020是一项关于车辆网络和通信系统安全性的国际标准,由国际标准化组织(ISO)和Socie…
【AUTOSAR】【以太网】DoIp
AUTOSAR专栏——总目录_嵌入式知行合一的博客-CSDN博客文章浏览阅读217次。本文主要汇总该专栏文章,以方便各位读者阅读。https://xianfan.blog.csdn.net/article/details/132072415 目录
一、概述
二、功能描述
2.1 Do
9.2 校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 2024届博世智能驾驶与控制事业部校园招聘正式启动(内推)
校招 | 2024届博世智能驾驶与控制事业部校园招聘正式启动(内推) 2、校招 | …

中汽协确认参加2023EVH新能源动力总成年会
演讲主题:中国汽车工业经济运行情况
演讲大纲:
对中国汽车工业近期发展态势进行分析2023年汽车行业预测
陈士华
现任中国汽车工业协会副秘书长,兼任中国汽车工业经济技术信息研究所有限公司总经理
1999年3月至今,就职于中国汽…
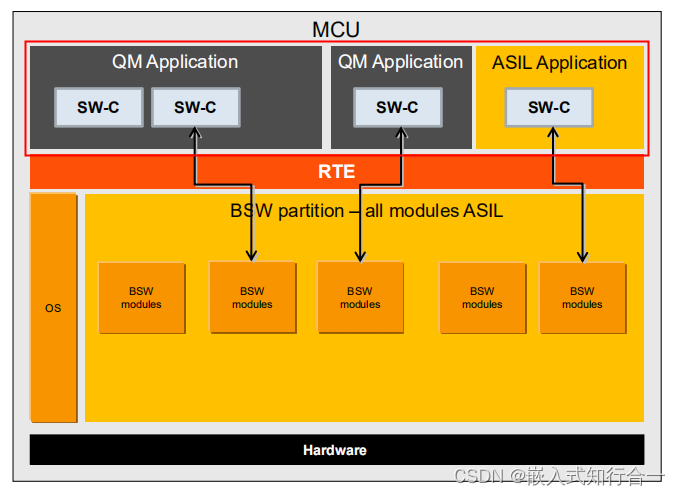
1-3 AUTOSAR软件架构
目录
一、简介
二、基础软件层 BSW
2.1 微控制器抽象层
2.2 ECU抽象层
2.3 复杂的驱动程序
2.4 服务层
三、运行时环境 RTE
四、应用软件层 SWC 一、简介 分层架构是实现软硬件分离的关键,它使汽车嵌入式系统控制软件开发者摆脱了以往 ECU 软件开发与验证时…
Linux安全学习路标
1. 操作系统基础知识
首先,你需要建立坚实的操作系统基础知识,包括Linux文件系统和目录结构、Linux进程管理、权限管理等基本概念。
2. 网络和通信安全
学习关于网络和通信安全的基础知识,包括TCP/IP协议栈、网络攻击类型、防火墙配置、网…
<sa8650>sa8650 qcxser-之-串行解串器GPIO输入输出
<sa8650>sa8650 qcxser-之-串行解串器GPIO输入输出 <sa8650>sa8650 qcxser-之-串行解串器GPIO的map <sa8650>sa8650 qcxser-之-串行解串器ERRB的map <sa8650>sa8650 qcxser-之-串行解串器ADC使用 <sa8650>sa8650 qcxser-之-串行解串器GPIO输入输出 一 通用输入和输出…

Safran与是德科技合作为蔚来提供电动汽车中的5G和C-V2X连接测试
概述
虹科Safran GNSS模拟器助力是德科技(Keysight)为中国顶级电动汽车制造商之一——蔚来汽车(NIO)提供了业界领先的UXM 5G测试解决方案以验证5G和C-V2X的连接性,能够根据3GPP和其他标准组织定义的最新5G新无线电&am…
模数转换器-ADC基础
文章目录 一、ADC是什么二、ADC处理采样保持量化编码三、ADC采样的重要参数:测量范围:分辨率(Resolution):精度:采样时间:采样率(Sampling Rate):信噪比(Signal-to-Noise Ratio, SNR):转换时间:一、ADC是什么
ADC(Analog-to-Digital Converter):模拟数字转换器…
Bootloader——安全机制
文章目录 一、安全机制的目的二、安全机制1.安全访问安全访问算法风险2. 预编程条件3.完整性校验4.一致性检查(兼容性)5.有效性检查6.刷新文件格式总结一、安全机制的目的
为确保刷写的安全,ECU需设计安全机制,避免以下几种情况:
a. 来自非法源的下载动作;
b. 当前刷新条…
Autosar-Port Interface
文章目录 一、PortPrototype接口的类型二、PortInterfaceSender-Receiver Interface(发送者-接收者接口):传输数据;NvDataInterfaceParameterInterfaceMode Switch Interface(模式转换接口)Client-Server Interface(客户端-服务器接口):提供Operation服务(同步或异步…
11 认识binder及分类
认识binder及分类
一、binder是什么? binder是一种通信机制 binder是IPC通信中的一种,IPC:进程间通信机制(Inter-Process Communication) 在Android中常用的进程间通信有共享内存、管道、信号处理、sockect、Binder等; 内核和用户空间之间常用的是共享内存机制; 一些低数…
哈弗枭龙MAX将在9月上旬推出首次OTA升级,保不住电?不存在的
9月1日消息,哈弗品牌执行副总经理乔心昱昨晚通过个人微博向网友们回应了关于哈弗枭龙MAX电池保持的问题。乔心昱表示,在与紧急技术团队确认后,他首先澄清了一个误会:大家可以放心使用,正常情况下没有电池问题。 此外&a…
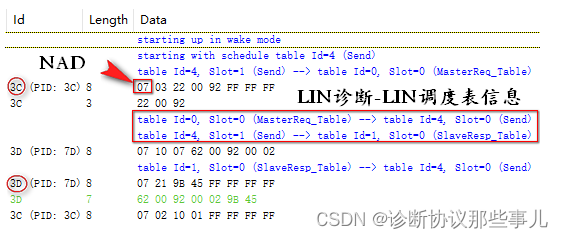
UDSonLIN(ISO14229-7)诊断协议
文章目录 前言一、UDSonLIN实现的需求二、定义诊断等级1.诊断等级一2.诊断等级二3.诊断等级三三、LIN主节点的设计主节点的故障管理、传感器读取和I/O控制四、LIN从节点的设计前言
在基于CAN的诊断学习之余,本文为大家介绍UDSonLIN的相关内容,与UDS应用部分相对独立,可以单…

|行业洞察·汽车|《2024新能源汽车行业及营销趋势报告-20页》
报告的主要内容解读: 新能源汽车行业概述及品牌分布: 近年来,中国新能源汽车销量增速高,市场占有率快速提升,成为汽车行业的重要增量。新能源汽车消费者趋向年轻化、女性化和高端化,对高科技、新体验有较高…
王升:Audio电感对车载功放EMC的影响 | 演讲嘉宾公布
一、智能车载音频 II 专题论坛 智能车载音频 II 专题论坛将于3月28日同期举办! 我们正站在一个前所未有的科技革新的交汇点上,重塑我们出行体验的变革正在悄然发生。当人工智能的磅礴力量与车载音频相交融,智慧、便捷与未来的探索之旅正式扬帆…
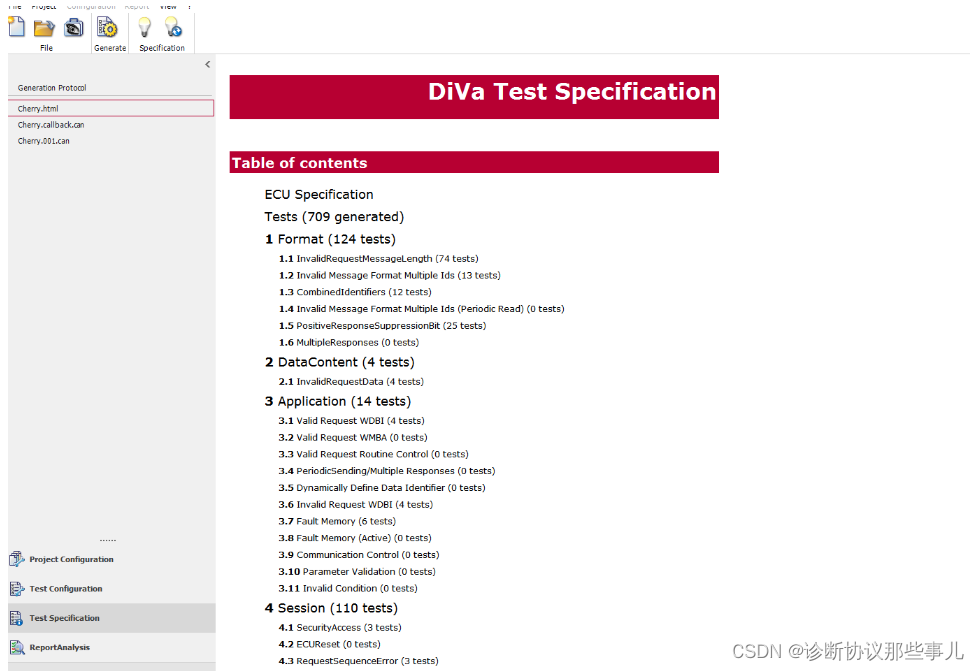
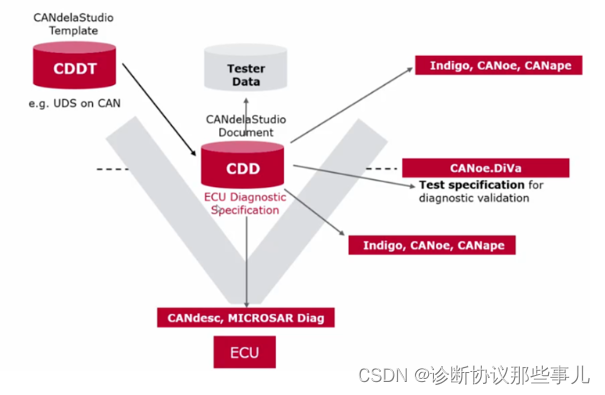
CANoe.Diva生成测试用例
Diva目录 一、CANoe.Diva打开CDD文件二、导入CDD文件三、ECU Information四、时间参数设置五、选择是否测试功能寻址六、勾选需要测试服务项七、生成测试用例 一、CANoe.Diva打开CDD文件
CANoe.Diva可以通过导入cdd或odx文件,自动生成全面的测试用例。再在CANoe中导…

大发汽车紧急关闭日本4家工厂,停工时间延长至明年1月|百能云芯
大发汽车近期的生产线关闭引起了广泛关注,丰田汽车旗下的大发汽车公司因为不当测试和资料造假问题而被迫采取了紧急措施,关闭了其在日本的全部4家工厂的生产线。这一决定不仅对大发汽车本身产生潜在影响,还牵涉到数千家汽车零部件制造商及其员…
高通芯片在车载系统上的主要功能?和NXP芯片的区别?
目录
高通芯片在车载系统上的主要功能?
高通芯片和NXP芯片的区别 高通芯片在车载系统上的主要功能?
高通芯片在车载信息娱乐系统(IVI)上的主要功能包括: 高性能计算:高通的骁龙汽车平台提供了强大的计算…
以太网——ARP协议工作原理
ARP目录 MAC地址一、ARP是什么?二、ARP工作原理工作机制总结三、ARP报文结构四、ARP缓存MAC地址
我们知道别人的 IP 地址后,就能够向这个 IP 地址所在的主机发送数据包。但是IP 地址只是标识网络层的地址,那么在网络层下方数据链路层是不是也有一个地址能够告诉对方主机自己…
Android CarService源码分析
文章目录 一、CarService的基本架构1.1、Android Automative整体框架1.2、Framework CarService1.3、目录结构1.3.1、CarService1.3.2、Car APP 二、CarService的启动流程2.1、系统启动后在SystemServer进程中启动CarServiceHelperService2.2、CarService启动 三、CarService源…
<sa8650>sa8650 XBL-之-XBL配置指南
<sa8650>sa8650 XBL-之-XBL配置指南 1 XBL Config概述1.1XBL配置使用2 XBL配置图像生成3 XBLConfig库3.1 存储闪存库3.1.1 image布局3.1.2 元数据头详细信息3.2 RAM库3.2.1 身份验证3.2.2 API支持3.3 各种设备中的存储库4 添加 XBL Config项4.1 向构建环境中的XBLConfig
曾桂华:车载座舱音频体验探究与思考| 演讲嘉宾公布
智能车载音频 I 分论坛将于3月27日同期举办! 我们正站在一个前所未有的科技革新的交汇点上,重塑我们出行体验的变革正在悄然发生。当人工智能的磅礴力量与车载音频相交融,智慧、便捷与未来的探索之旅正式扬帆起航。 在驾驶的旅途中࿰…
以太网网络安全协议(十三)
一、IPsec协议 IPsec。它是指在IP首部的后面追加“封装安全有效载荷”(ESP)和“认证首部”(AH) ,从而对此后的数据进行加密,不被盗取者轻易解读。 二、TLS/SLL协议 SSL最早由网景公司提出,标准化…
<sa8650>sa8650开发板-之-刷机教程(flashing)
<sa8650>sa8650开发板-之-刷机教程 flashing 一、简介1、 目的1.2、 协议一、安装 PCATApp Installing PCATapp1、安装管理工具 Install Management Tools2、选择安装PCATApp Choose to install PCATapp二、MD flash1、打开PCATApp软件准备刷机。2、拨动开发板拨码开关S5-swi…
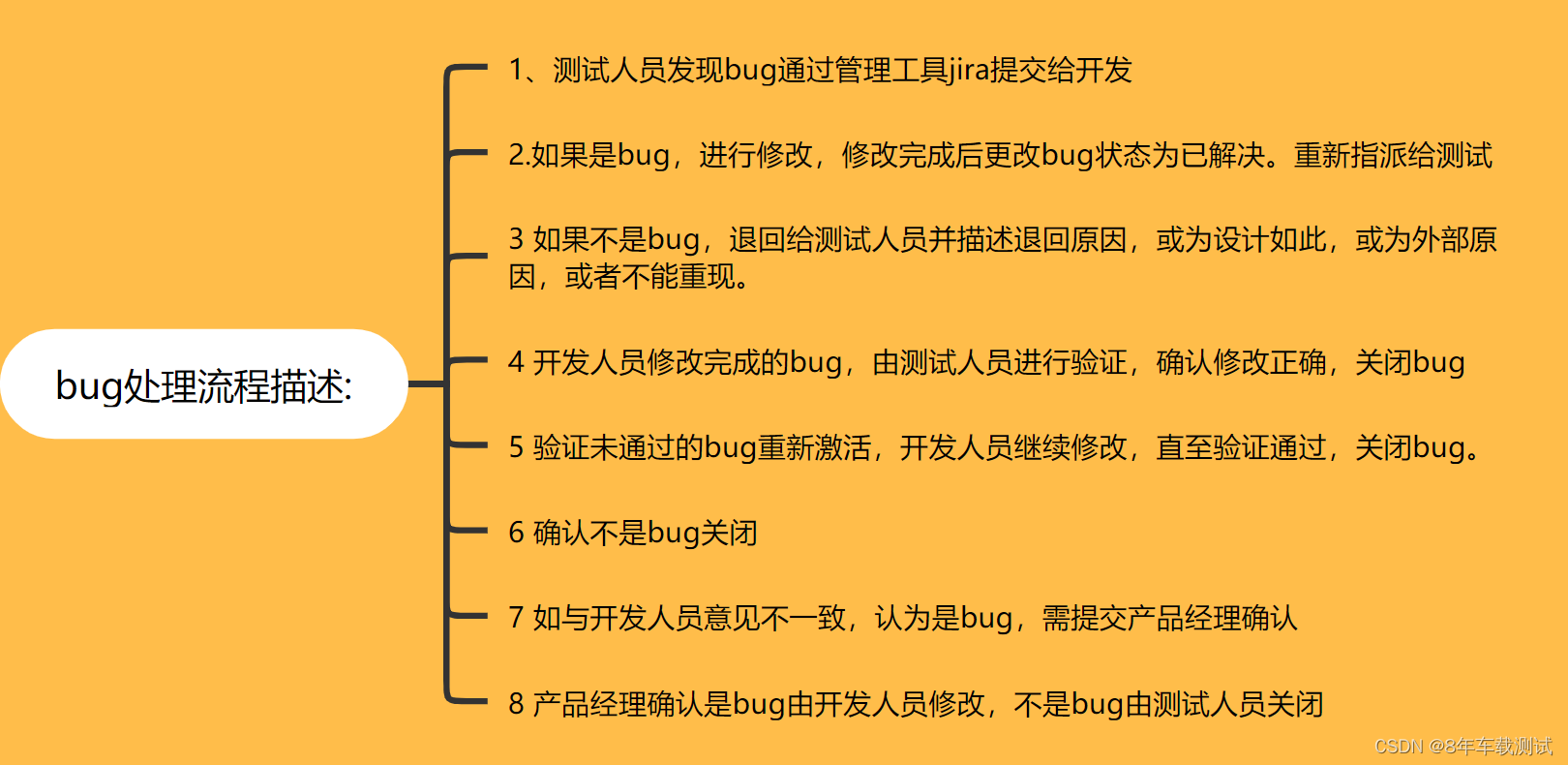
车载测试中:如何处理 bug
一:Jira 提交 bug 包含那些内容 二:如何处理现上 bug 三:车载相关的 bug 如何定位 四:遇到 bug ,复现不出来怎么办 五:bug 的处理流程 一:Jira 提交 bug 包含那些内容二:如何处理现上…

每天 26,315 美元罚款?交通安全局要求特斯拉提供 Autopilot数据
根据美国国家公路交通安全管理局(NHTSA)最近的特别命令,特斯拉公司被要求提供关于其自动驾驶功能Autopilot的相关信息。这一命令是继NHTSA于2021年8月启动初步评估后,在2022年6月升级为正式调查的一部分,NHTSA近期对特…

上滑动导航栏手势桌面最近任务可见解密-千里马手把手带你搞定framework车载车机系统开发
建议先看另一篇blog: https://blog.csdn.net/learnframework/article/details/123032419 系统如何让桌面执行对应的onStart方法呢?
具体的堆栈显示如下:
makeActiveIfNeeded:5788, ActivityRecord (com.android.server.wm)
makeVisibleIfNe…

深入理解badblocks
文章目录 一、概述二、安装2.1、源码编译安装2.2、命令行安装2.3、安装确认 三、重要参数详解3.1、查询支持的参数3.2、参数说明 四、实例4.1、全面扫描4.2、破坏性写入并修复4.3、非破坏性写入测试 五、实现原理六、注意事项 团队博客: 汽车电子社区 一、概述 badblocks命令是…
Autosar-LIN通信(LinTrcv)
文章目录 前言一、LinTrcv二、功能说明LIN驱动的状态机如下图所示LIN收发器驱动器的操作模式如下图所示LIN收发器唤醒类型LIN收发器唤醒模式开发错误三、LIN芯片手册四、工具配置1.LinTrcvGeneral2.LinTrcvChannel前言
LIN 是 Local Interconnect Network(局部互联网) 的缩写…
座舱台架介绍与搭建流程
座舱台架介绍
车载测试中的座舱台架测试包括以下几个方面:
仪表盘:测试仪表盘的显示、功能、光线反射和防眩目性能等。评估仪表盘是否能够提供准确的驾驶信息,并能在各种光照条件下清晰可见。中控屏:测试中控屏的触摸响应、图像…
戴姆勒——从豪华私家车到无人驾驶飞机
戴姆勒(DaimlerAG)是梅赛德斯-奔驰和精灵(Smart)汽车的德国母公司。自1926年其前身公司合并为戴姆勒-奔驰公司以来,戴姆勒在生产豪华和消费型汽车、卡车和公共汽车方面有着悠久的历史。
如今,除了以其精密设计的汽车闻名外,该公司还在设计、…

【Android车载系列】第7章 车载通信-USB通信原理
前一章节简单介绍了串口、串口与USB的区别、Android上的串口通信实现,本章节我们来了解一下USB通信协议以及Android上实现USB通信的相关知识。
1 USB简介 通用串行总线 (Universal Serial Bus,USB) 是一种新兴的并逐渐取代其他接口标准的数据通信方式&a…
深入理解Rust基本类型
文章目录 一、概述二、数值类型2.1、整数类型2.2、浮点类型2.3、数字运算2.4、位运算2.5、序列(Range)2.6、有理数和复数 三、字符、布尔、单元类型3.1、字符类型3.2、布尔类型(bool)3.3、单元类型 团队博客: 汽车电子社区 一、概…
Android Launcher3各启动场景源码分析
文章目录 一、概述二、开机启动Launcher2.1、开机启动Launcher流程图2.2、开机启动流程源码分析 三、短压Home键启动Launcher3.1、短压Home键启动Launcher流程图3.2、短压Home键启动Launcher源码分析 四、Launcher异常崩溃后的自启动4.1、Launcher异常崩溃后的自启动流程图4.2、…
<sa8650>sa8650 CDT-之-针对SA8650 LeMans芯片组SP的快速指南
<sa8650>sa8650 CDT-之-针对SA8650 LeMans芯片组SP的快速指南 1 前言2 CDT的更详细信息3 需要由板中的自定义CDT处理的依赖关系。<sa8650>sa8650 CDT-之-汽车CDT配置用户指南(上) <sa8650>sa8650 CDT-之-汽车CDT配置用户指南(下) <sa8650>sa8650 CDT-之-针对SA8650…
龙迅LT2611UXC 2 PORT LVDS桥接到HDMI 2.0,内置MCU,颗自行操作
龙迅LT2611UXC描述:
LT2611UXC是一个高性能的LVDS到HDMI2.0的转换器,用于STB,DVD应用程序。LVDS输入可以配置为单端口或双端口,有1个高速时钟通道,3~4个高速数据通道,最大运行1.2Gbps/通道,可支…
【AUTOSAR】【通信栈】IPduM
AUTOSAR专栏——总目录_嵌入式知行合一的博客-CSDN博客文章浏览阅读310次。本文主要汇总该专栏文章,以方便各位读者阅读。https://xianfan.blog.csdn.net/article/details/132072415 目录
一、概述
二、相关模块
2.1 OS
qnx 上screen + egl + opengles 最简实例
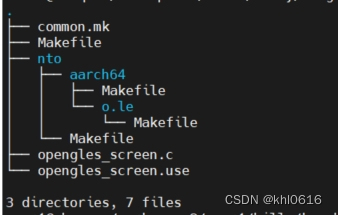
文章目录 前言一、qnx 上的窗口系统——screen二、screen + egl + opengles 最简实例1.使用 addvariant 命令创建工程目录2. 添加源码文件3. common.mk 文件4. 编译与执行总结参考资料前言
本文主要介绍如何在QNX 系统上使用egl和opengles 控制GPU渲染一个三角形并显示到屏幕上…
【Android】权限接口需求修改
系统:Android8.0
1.放开所有权限
所有的应用,不管是系统应用还是非系统应用,只要在manifest中定义的权限,首次开机检测时通通默认赋予 \framework\base\services\core\java\com\android\server\pm\permission\PermissionManager…
<sa8650>sa8650 CDT-之-汽车CDT配置用户指南(下)
<sa8650>sa8650 CDT-之-汽车CDT配置用户指南(下) 3 设备树3.1 匹配CDT与DTS3.2 修改CDT信息,以选择不同的设备树4 CDT的使用4.1 CDT在TZ中的使用4.2 CDT在主机中的使用(QNX)4.3 在安卓系统中使用CDT5 计划/条款CDT5.1 程序CDT使用TRACE325.2 程序CDT使用PCAT与窗口机器5…
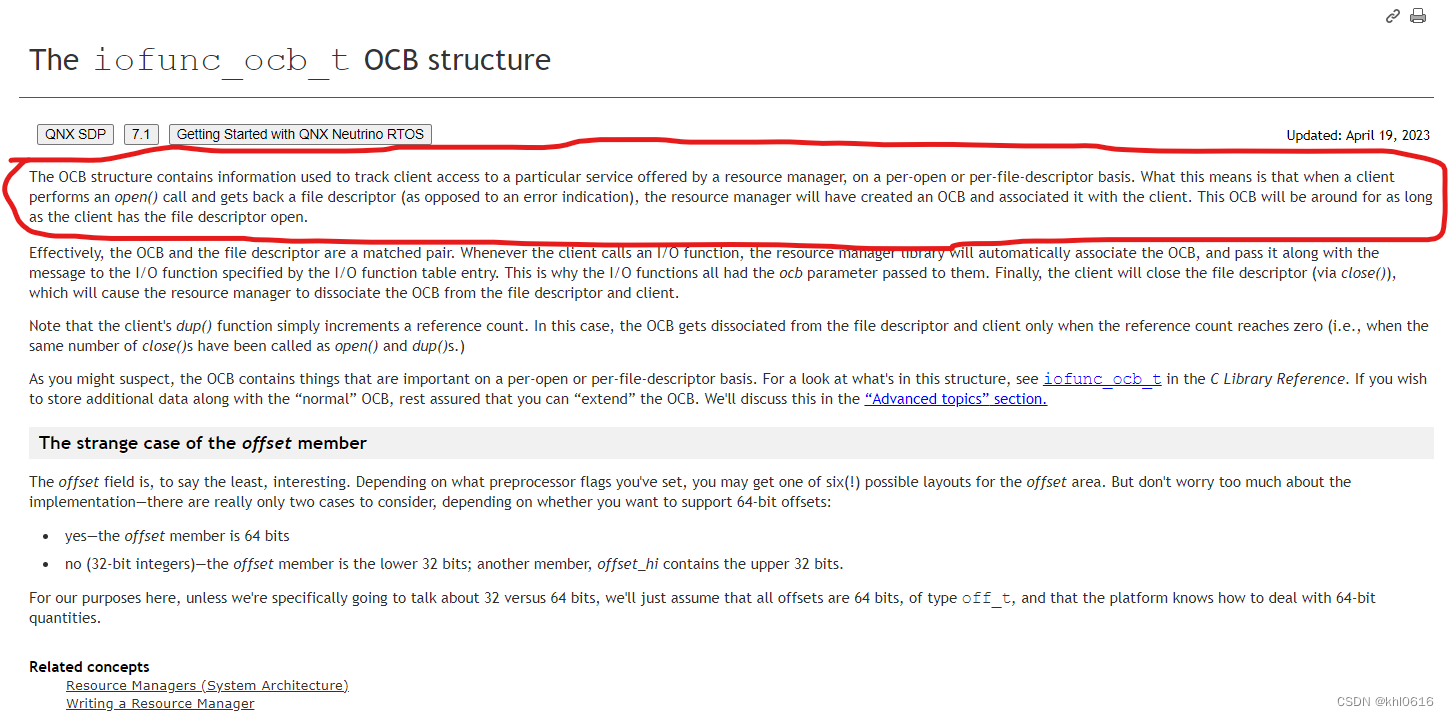
resource manager OCB structure(iofunc_ocb_t) 扩展实例
文章目录 前言一、OCB structure(iofunc_ocb_t) 是什么二、OCB structure(iofunc_ocb_t) 扩展实例1.OCB structure(iofunc_ocb_t) 扩展后的使用实例总结参考资料前言
本文主要介绍如何对qnx系统下的resource manager OCB structure(iofunc_ocb_t) 数据结构进行扩展 软件环境:…

车载相关名词--车载数据中心方案
车载数据中心方案
参考链接:https://zhuanlan.zhihu.com/p/600031042?utm_id=0 下面这张图是小鹏汽车嵌入式系统高级专家 唐黾 在同ARM一起的一个演讲稿中发布的,是一张未来车载数据中心单芯片方案构想图。主要针对的是智驾域和座舱域融合方案,下面对如上图的内外部组件及…
以太网基础——DoIP报文类型
文章目录 前言一、DoIP payload types二、节点管理报文0x0000:Generic DoIP header negative acknowledge0x0001:Vehicle identification request message0x0002:Vehicle identification request message with EID0x0003:Vehicle identification request message with VIN0…

CAN_相关的测试用例+测试方法+测试工具使用+输出测试报告
测试类型: 第一:通信测试 第二:间接网络管理测试 第三:AUTOSAR网络管理测试 第四:诊断协议栈Diva测试 第五:诊断协议补充测试 第六:Bootloader测试 第七:网…
Autosar工具-Davinci Developer
文章目录 前言一、Davinci Developer简介二、导航栏File(主要是用于保存、打开工程等操作)HomeProject(主要用于导入、导出arxml文件)Graphic(主要在SWC设计时使用,包含对图形界面下的设计工具)Window(主要就是对我们的Dev界面外形修改用的,使得界面更加方便我们使用(比如隐…
车载系统开发—【car-aosp】开发环境配置
简述
基于Android系统作为一个庞大的开源项目,除了一些谷歌自带服务之外,其他所有代码均以AOSP(Android Open Source Project)的形式开源。对于框架开发者来说,熟悉AOSP是必不可少的知识。即使是普通开发者࿰…

android多屏触摸相关的详解方案-安卓framework开发手机车载车机系统开发课程
背景
直播免费视频课程地址:https://www.bilibili.com/video/BV1hN4y1R7t2/
在做双屏相关需求开发过程中,经常会有对两个屏幕都要求可以正确触摸的场景。但是目前我们模拟器默认创建的双屏其实是没有办法进行触摸的
修改方案1
静态修改方案 使用命令…
2024.3.7 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | 百度智能驾驶事业群组2024春季补录进行中(内推)
校招 | 百度智能驾驶事业群组2024春季补录进行中(内推) 2、校招 | 德赛西威 202…
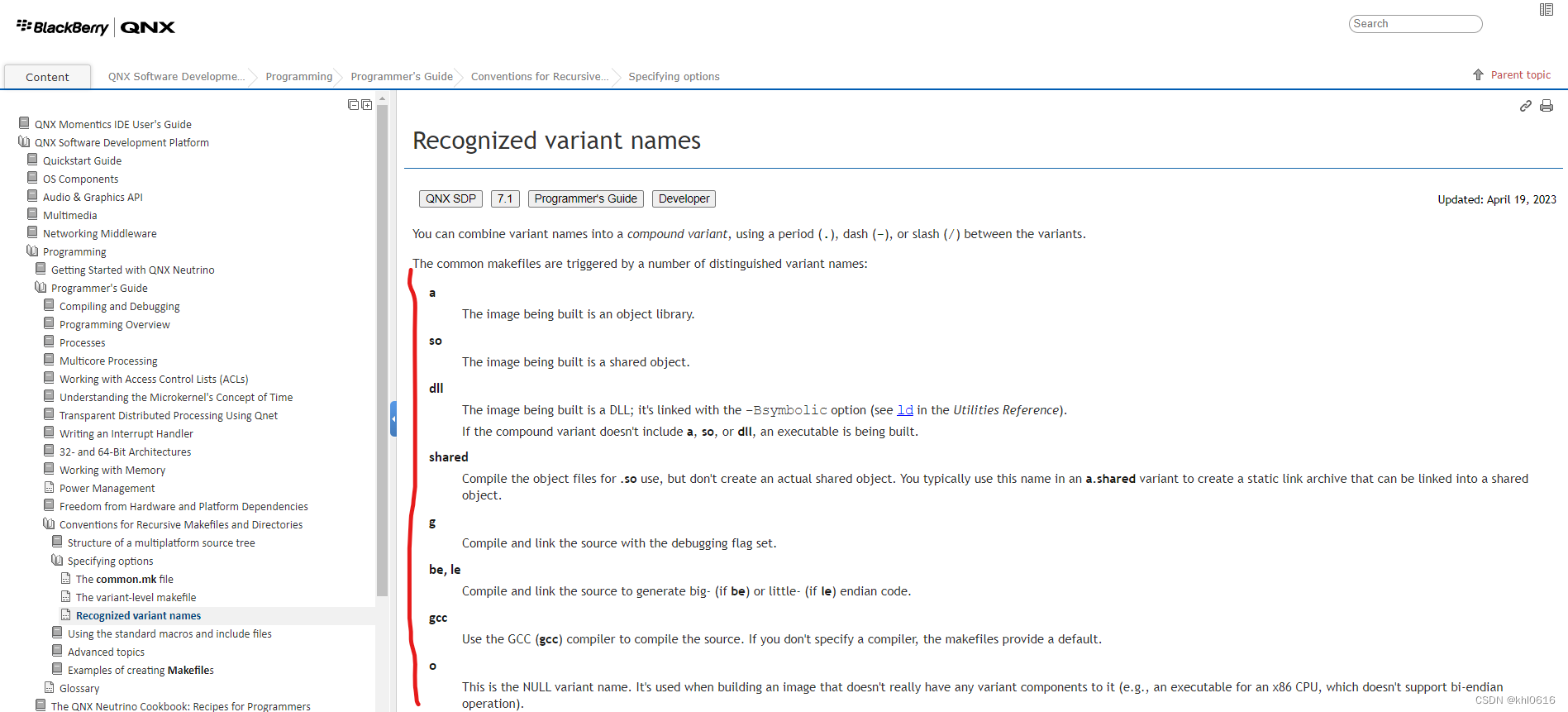
qnx 工程目录创建工具 addvariant
文章目录 前言一、addvariant 是什么二、addvariant 使用实例1. variant names 参数说明2. 创建一个可执行文件工程3. 创建一个动态库工程 总结参考资料 前言
本文主要介绍如何在qnx 开发环境中创建工程目录及其相关的配置文件(common.mk, Makefile 文件等) 软件版本ÿ…

STM32 CAN使用记录:bxCAN基础通讯
文章目录 目的关键配置与代码轮询方式中断方式收发测试 示例链接总结 目的
CAN是非常常用的一种数据总线,被广泛用在各种车辆系统中。这篇文章将对STM32中CAN的使用做个示例。
CAN的一些基础介绍可以参考下面文章: 《CAN基础概念》https://blog.csdn.n…

如何使用网络测试仪对车载终端进行时间同步测试
车载以太网概述
车载以太网是一种用以太网连接车内电子单元的新型局域网技术,与传统以太网使用4对非屏蔽双绞线电缆不同,车载以太网在单对非屏蔽双绞线上可实现100Mbit/s,甚至1Gbit/s的传输速率,同时还满足汽车行业对高可靠性、低…
Autosar基础——RTE简介
AutoSAR文章目录 AUTomotive Open System Architecture Autosar-简介和历史发展 Autosar-软件架构 Autosar软件组件-Application Layer介绍和SWC(Software Component)类型 Autosar-Runnables(可运行实体) Autosar-OS配置 Autosar IOC机制(核间通信) Autosar实践-CANTp Auto…

Hal深入实战/perfetto-systrace实战/SurfaceFlinger合集-安卓framework开发实战开发
背景
hi,粉丝朋友们: 大家好! 下面来介绍一下新的framework专题halperfettosurafceflinger,这个专题主要就是分为3大块,但是彼此直接又是相互关联的。 比如surfaceflingre模块深入分析需要用到hal相关的模块ÿ…
<sa8650>sa8650 partition-之-新增分区加img
<sa8650>sa8650 partition-之-新增分区加img 一、前言二、新增分区2.1 新增用户分区2.2 生成新分区文件2.3 确认新分区文件2.4 rawprogram文件参数解析2.5 新增分区验证三、 镜像文件3.1 新增water.img编译脚本3.2 新增water.img编译脚本运行3.3 新增water.img打包3.4 新增wa…
CP Autosar——EthIf配置
EthIf目录 前言一、EthIf简介二、功能说明1.以太网控制器以及外设的索引功能2.报文发送功能Polling模式Interrupt模式3.报文接收功能Polling模式(一般不使用)Interrupt模式三、Configuration实践EthIfConfigSetEthIfFrameOwnerConfigs:RxIndicationEthIfGeneral前言
Autosar…
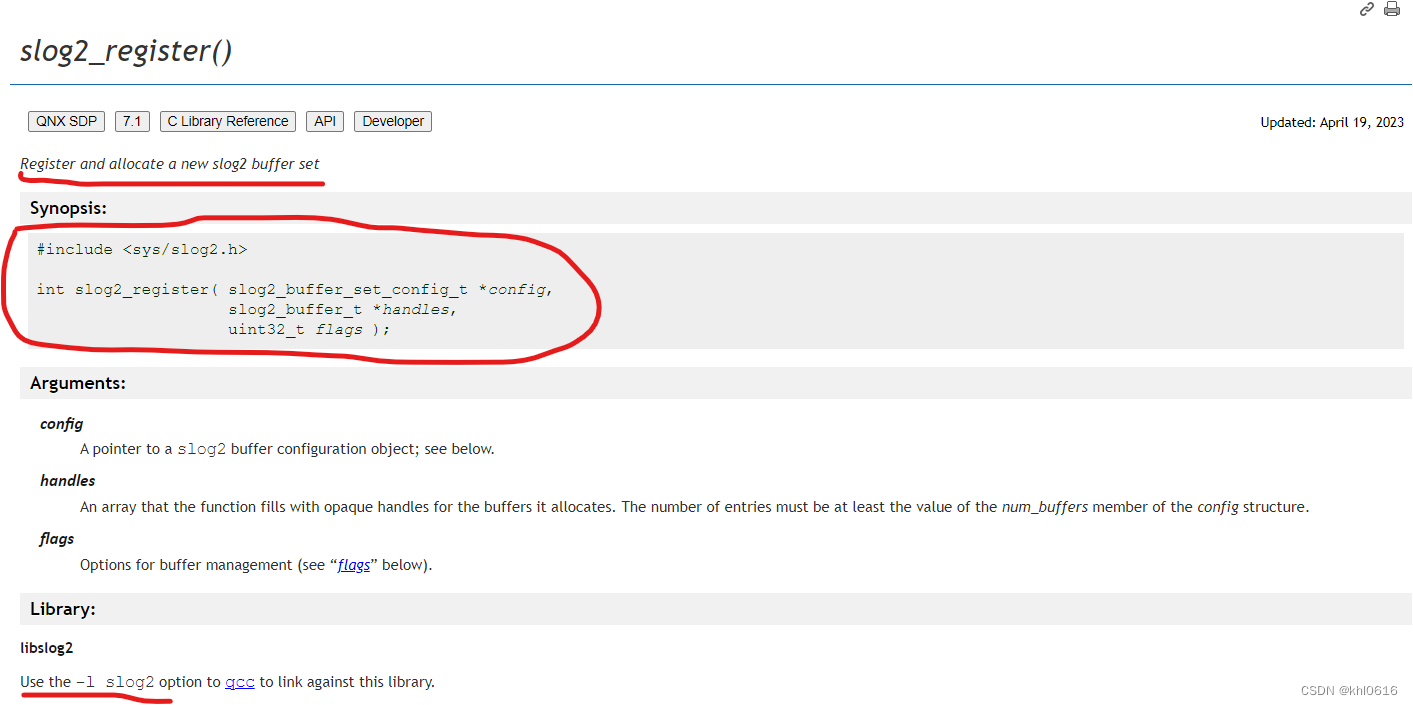
qnx log 系统
前言
本文主要介绍QNX 系统中的 log 打印相关接口和使用方法 软件环境:qnx7.1
一、QNX查看 log 的工具 slog2info
1. slog2info 的相关介绍
和linux 中查看 kernel log 信息的 dmesg 命令一样, qnx 里面也有一个查看 log 信息的命令,那就是 slog2info 命令, 如下图所示是…
诊断DLL——CAPL_DLL集成安全访问算法
文章目录 前言一、CAPL DLL简介DLL生成C2338报错解决方案:二、添加27服务解锁算法三、CAPL调用dll前言
在实际诊断工程应用中,如UDS刷写——27服务,经常会遇到一些Seed2Key的算法问题,为了安全保密,这个算法的源码不便公开,我们可以将其打包成DLL,然后在CANoe诊断控制面…
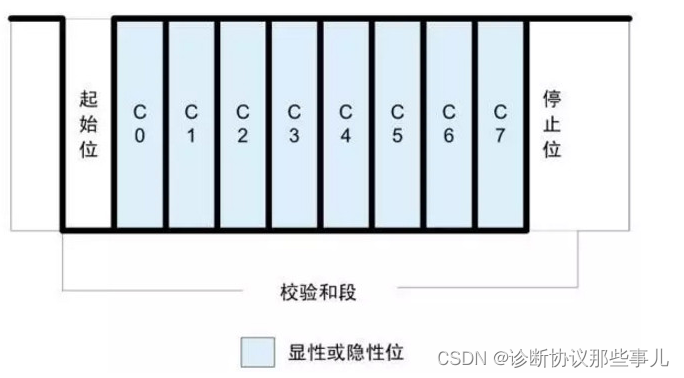
LIN-物理层(收发器)
文章目录 一、显性和隐性二、LIN的供电电压说明三、LIN通道数3.1 单通道3.2 双通道3.3 四通道 一、显性和隐性
LIN总线协议规定其物理层收发器的显性(Dominant , 逻辑 “ 0”,电气特性为GND(0V))和隐性电平(Recessive , 逻辑 “ …
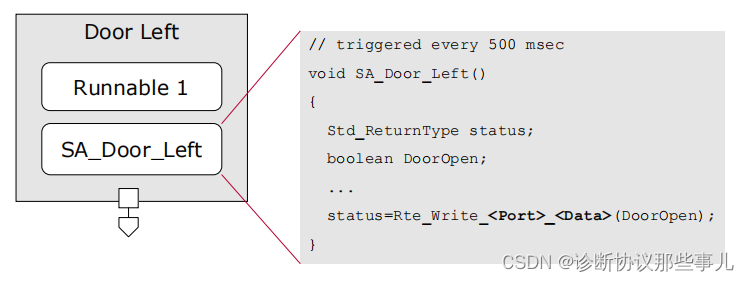
Autosar-Runnables(可运行实体)
文章目录 Runnable entities (简称Runnables)一、Runnables的定义二、Runnables的作用三、DaVinci配置总结Runnable entities (简称Runnables)
包含实际实现的函数(具体的逻辑算法或者操作) Runables由RTE周期性、或事件触发调用(如,当接收到数据、被操作调用)
一、Runna…

qnx resource managers 实例
文章目录 前言一、resource managers 是什么二、device resource managers 实例1. Single-threaded device resource manager2.Multithreaded device resource manager3.Resource Managers that Handle Multiple Devices总结参考资料前言
本文主要介绍如何编写一个 qnx 下 的 …

android 10车载桌面ActivityView触摸事件源码详解分析
hi,粉丝朋友们:
背景
大家好!近来居然有好几个粉丝朋友居然问到了一个虚拟屏幕触摸相关的问题,还有老版本android 10上面有个车载桌面使用的ActivityView可以正常触摸的问题。 其实这个ActivityView在最新的版本已经没有了&…
QNX 字符设备 resource manager 实例
文章目录 前言一、普通的 resource managers二、字符设备 resource managers1. 字符设备节点2. 字符设备 devctl cmd 参数1. devctl cmd 参数的构成2. devctl 字符设备实例总结参考资料前言
本文主要介绍如何编写一个 qnx 下 的 char device resource managers (字符设备驱动…
深入理解Rust语句和表达式
文章目录 一、概述二、语句三、表达式 团队博客: 汽车电子社区 一、概述
fn add_with_extra(x: i32, y: i32) -> i32 {let x x 1; // 语句let y y 5; // 语句x y // 表达式
}语句会执行一些操作但是不会返回一个值,而表达式会在求值后…
RK3588 Android 12 系统内核开发+Native层脚本自启动+SELinux配置
前言
开发板型号:RK_EVB7_RK3588_LP4…_V11目标:在开发板上随开机自启动脚本,带起二进制程序,并完备一些其他系统功能。简介:本文自启动脚本run.sh唯一的作用就是拉起二进制程序demo;demo是简单的hello_wo…

功能高集成化,稳定性强——便携式应急指挥箱,助力救援信息化
在一些突发事件现场,如地质灾害抢险救援,需要将现场的实时状况调度到指挥中心,从而能够清晰准确的判断险情,通过应急指挥系统,协调各部门启动应急流程,辅助现场做出更好的应急决策。 便携式应急指挥箱因其体…
常见Property属性
系统:Android10.0
设备: FireFly RK3399 (ROC-RK3399-PC-PLUS) 前言 一, 常见property属性
通过getprop命令可以获取系统中大部分的属性,为啥说是大部分, 因为还有一些因为selinux权限原因&am…
ECU安全学习网站和书籍介绍
ECU安全是指关注和保护汽车电子控制单元(ECU)的安全性和防护措施。ECU是现代汽车中的关键组件,它负责监控和控制车辆各种系统的运行,如发动机、制动、转向等。ECU安全的重要性在于防止恶意攻击者操控或干扰车辆的操作。
ECU安全涉…
深度入门 Android 车机核心 CarService 的构成和链路
作者:TechMerger 本文将结合 Android 系统整体,对 CarService 的构成和链路对其做一个全面的分析和理解。
构成
1. CarServiceHelperService 系统服务
SystemServer 中专门为了 Automotive OS 设立的系统服务,用来管理车机的核心服务 CarS…
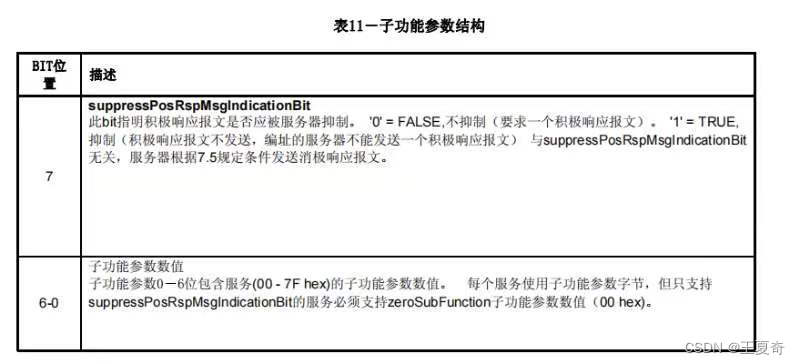
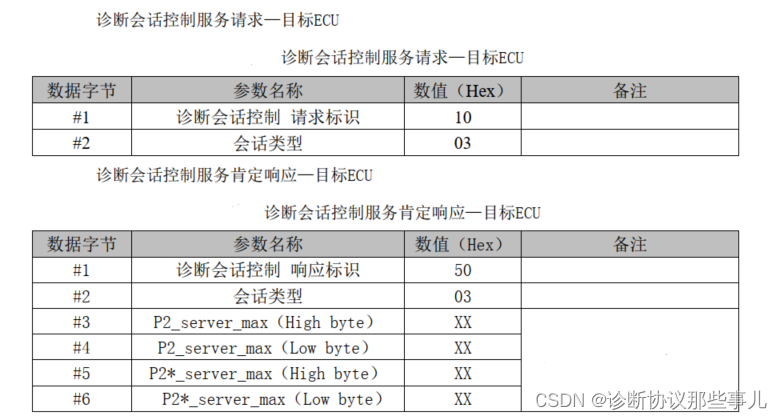
抑制肯定响应位的解释与理解
1:基本概念
Suppress positive response bit(抑制肯定响应位),此位1时,服务器会对(需要进行正响应操作,予以忽略)
2:所处位置
Suppress positive response bit&#x…
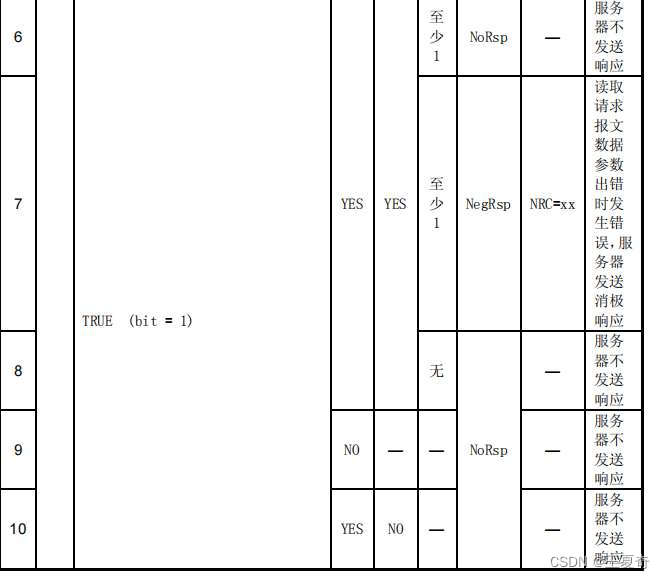
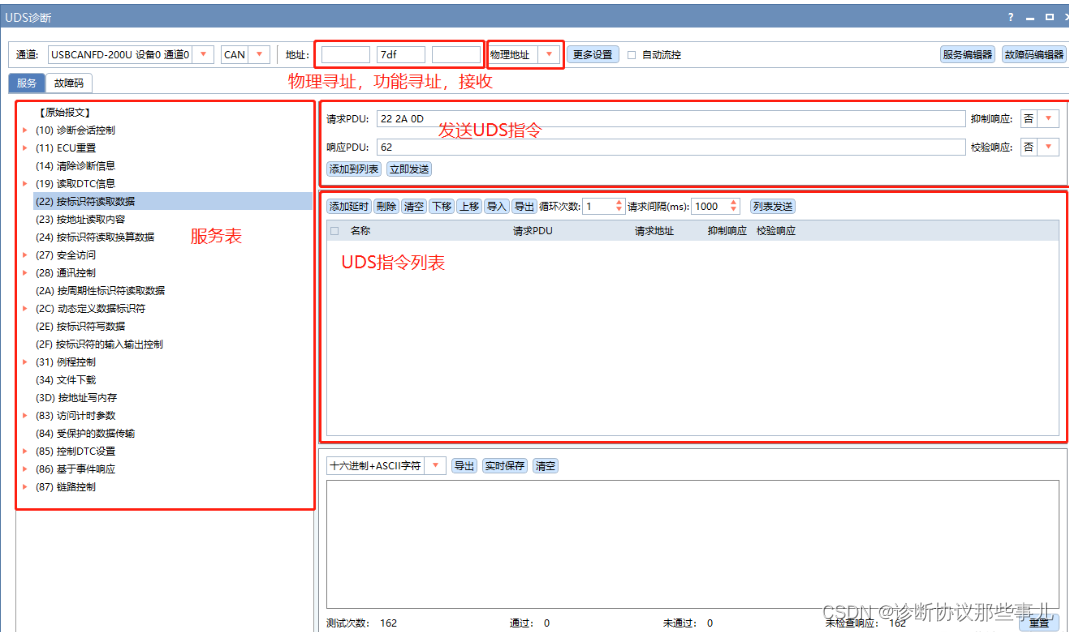
物理寻址和功能寻址,服务器不同的应答策略和NRC回复策略
1:功能寻址,服务器应答与NRC回复策略
详细策略上,又分为服务有子功能,和不存在子功能。
1.1功能寻址,存在子功能
存在子功能的情况下,又分为supress postive response (即子功能字节的bit7&a…

小鹏、长城先后宣布智能计划,传统车企与新势力决战AI赛点?
点击关注 文|姚 悦,编|王一粟
“尽管我们已经造车30多年,但现在我们面临一个全新问题和挑战。”长城汽车AI Lab负责人杨继峰表示,“在AI时代里每个问题都是AI问题。”
杨继峰所负责的AI Lab,正是长城汽车…
Autosar - Time Sync(时间同步)
文章目录 标准术语StbM:Synchronized Time-base Manager时间同步服务时间矫正算法CAN TimeSyncAutoasr配置实践StbMCanTSynCanIf标准术语 标准术语解释说明Clock硬件层面的定时器时钟Global Time Master全局主时钟,作为最高级别时钟源Synchronized Time Base全局时间,表示被…
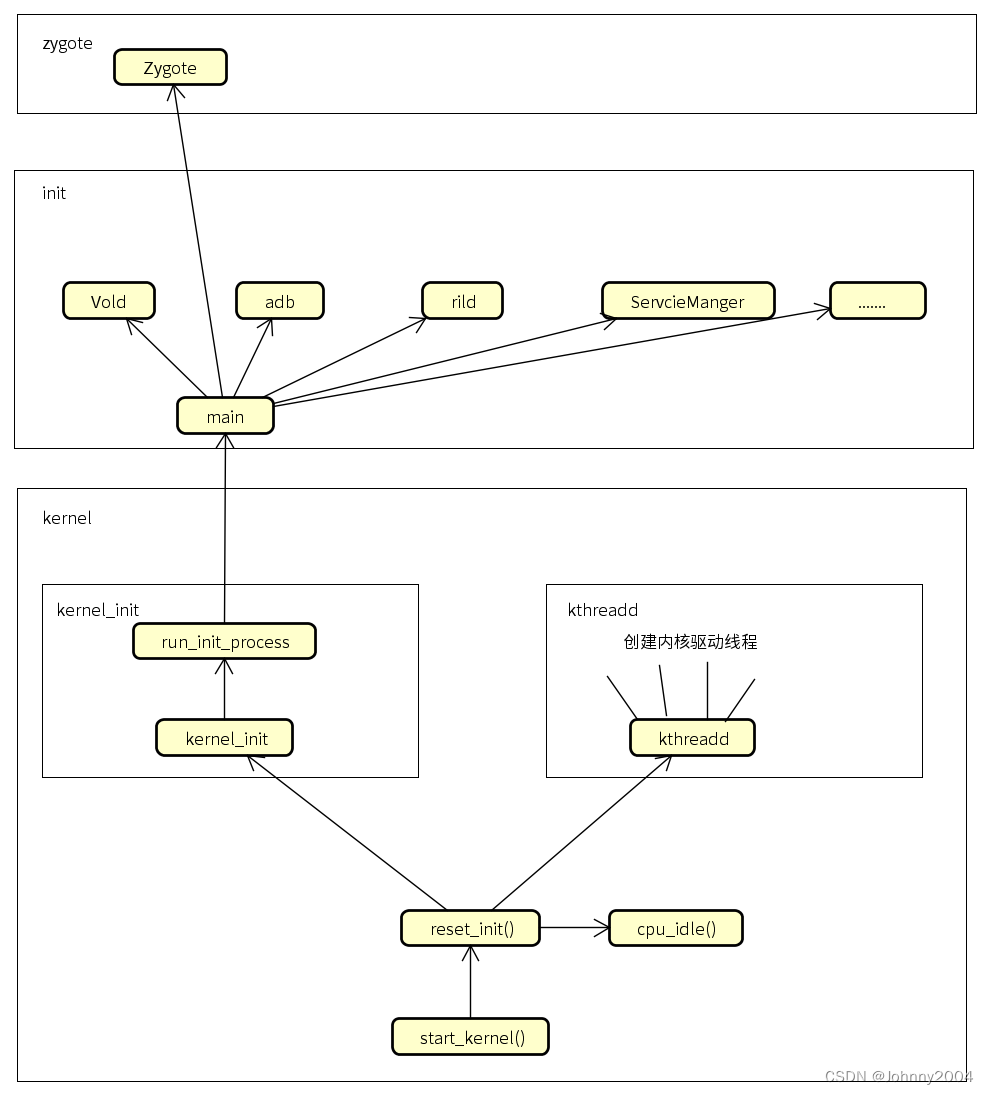
02 Android开机启动之BootLoader及kernel的启动
Android开机启动之BootLoader及kernel的启动
1、booloader的启动流程 第一阶段:硬件初始化,SVC模式,关闭中断,关闭看门狗,初始化栈,进入C代码 第二阶段:cpu/board/中断初始化;初始化内存以及flash,将kernel从flash中拷贝到内存中,执行bootm,启动内核 2、kernel的启…
【Android车载系列】第12章 车载渲染-SurfaceFlinger单独绘制到界面
1 SurfaceFlinger渲染方案
车载的倒车影像同学们知道是怎么实现的吗?等待Android设备开机再打开倒车影像App?车子挂到R档倒车如果等待这个流程实在太久,是否还有其它办法可以让车子挂R档直接展示倒车影像呢?大家思考一下。 我们从…
车载开发——彻底了解CAN总结
CAN总线(Controller Area Network)是一种用于车辆内部通信的串行通信协议。它是一种高速、可靠的通信系统,旨在实现车辆各个部件之间的高效数据传输。CAN总线最初由德国Bosch公司于1983年开发,如今已成为汽车行业中最常用的通信标…
Autosar-LIN通信(LIN)
文章目录 前言一、Lin二、体系架构三、状态机四、瑞萨RH850芯片手册五、工具配置LinDemEventParameterRefs前言
LIN 是 Local Interconnect Network(局部互联网) 的缩写,是基于 UART/SCI(Universal Asynchronous Receiver-Transmitter / Serial Communication Interface,通…
Autosar-Interface接口
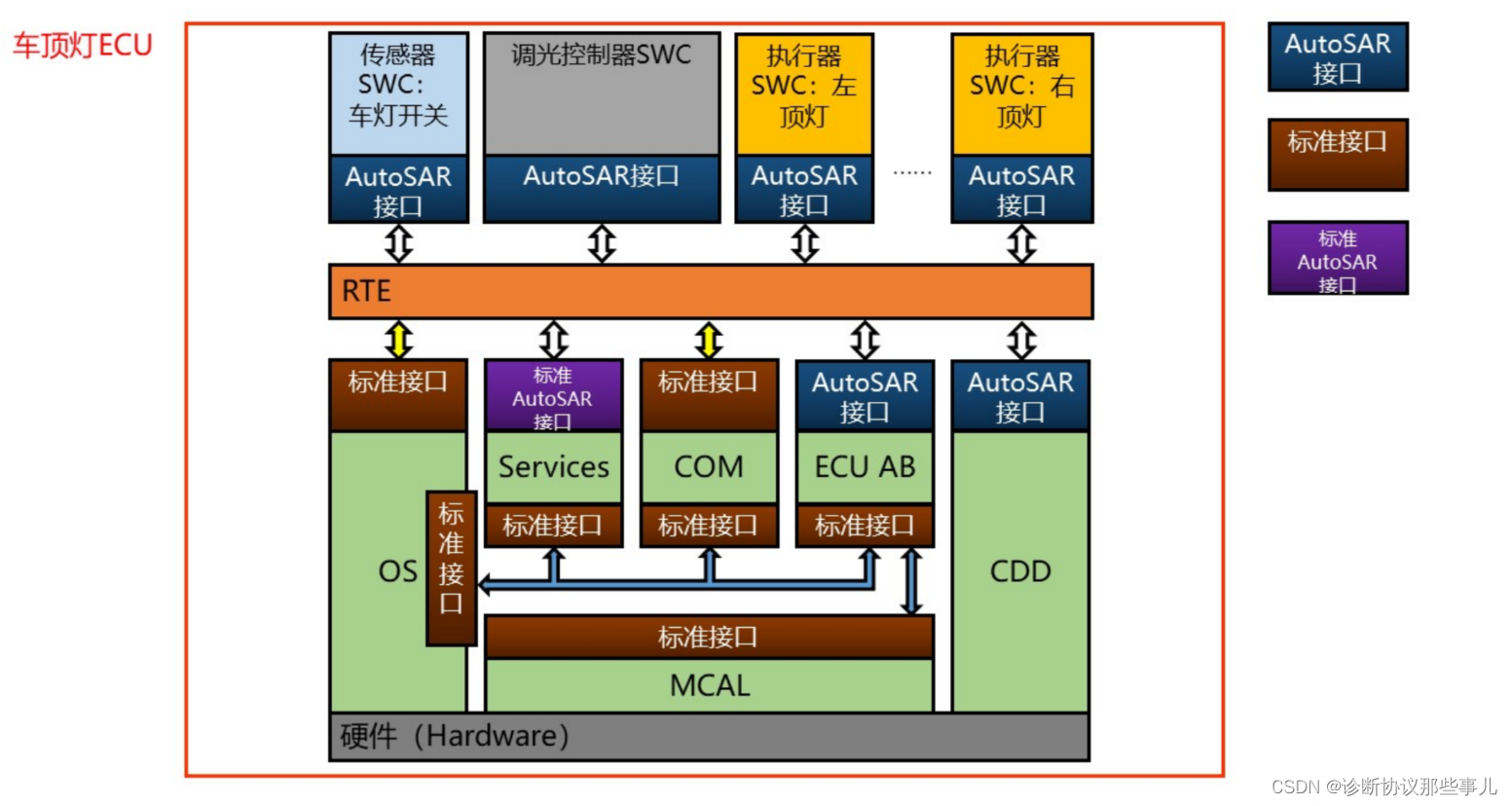
文章目录 一、Autosar接口1、AUTOSAR Interface2、Standardized Interface3、Standardized AUTOSAR Interface二、AUTOSAR接口的通用规则三、示例-存储四、总结一、Autosar接口
在Autosar里规定了三类接口,分别是AUTOSAR接口,标准AUTOSAR接口和标准接口。
下图将所有的接口…
03 Android开机启动之init进程
Android开机启动之init进程
一、分析init进程做了什么?
init 进程,当linux内核启动后,运行的第一个就是init,Android init进程的入口文件是在system/core/init/init.cpp中,由于init是命令行程序,所以分析init.cpp首先从main函数开始。 init main函数开始:创建目录,挂载…

以太网TCP协议(十二)
目录
一、概述
二、功能
2.1 连接管理
2.2 响应与序列号
2.3 超时重发
2.4 传输单位:段
2.5 窗口控制
2.6 流控制
2.7 拥塞控制
2.8 效率提高
三、报文格式 一、概述 TCP作为一种面向有连接的协议,只有在确认通信对端存在时才会发送数据&…